C8051F040的車用CAN總線智能節點設計

電氣與電子系統是車輛的重要組成部分,其工作狀態直接影響車輛的性能。按照傳統設計思想設計車輛電氣系統時,往往采取堆積各種子系統的途徑來提高系統的性能,因此車輛內部各子系統之間單純面向任務而不考慮與全局的關系。隨著子系統及裝置數量不斷增加,傳統設計方法遇到了一系列問題:線路增多、布線復雜、電磁干擾增加、系統可靠性下降、檢查維修困難等。為了解決上述問題,現代車輛采用了綜合電子系統。總線是綜合電子系統的基礎,通過總線節點,綜合電子系統可采集、使用、分配和共享車內所有電子系統的各種信息,達到弱化矛盾、增強整體功能的目的。CAN總線由于具有性價比高、可靠性高、實時性好、靈活性強等特點,得到廣泛應用。本文針對CAN總線,提出了一種基于C8051F040的通用總線智能節點的設計方法。
1 總體設計
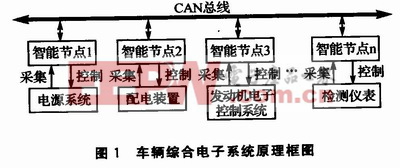
本文采用C8051F040單片機作為智能節點的主控芯片來設計CAN總線通用智能節點。智能節點通過現場信號調整、高速數據采集獲取該節點下設備的參數,并通過總線收發器將數據發送到CAN總線,同時根據參數及總線上的其他信息和命令對設備進行控制。通過CAN總線智能節點,可將車輛電氣系統各子系統及設備緊密聯系在一起,構成一個實時控制網絡,如圖1所示。
考慮到智能節點的通用性,經過對車輛各子系統和設備參數進行分析,確定了智能節點主要指標。
①信號輸入:8路模擬信號輸入,16路數字信號輸入,2路脈沖量輸入;
②控制信號輸出:2路模擬控制信號輸出,8路數字信號輸出;
③CAN總線接口:1個CAN總線接口(支持CAN2.0A和CAN2.0B)。
2 硬件設計
CAN總線節點有兩種設計方法,一種采用通用微控制器結合獨立CAN控制器加上收發器,另一種采用集成CAN控制器的微控制器結合CAN收發器。本文采用第二種設計方法,選用1片C8051F040單片機作為智能節點的主控芯片。主控芯片內部集成CAN控制器,兼容CAN2.0A和CAN2.0B,配合總線收發器后可完成CAN通信。此外,主控芯片還使用內部集成的A/D轉換器完成對模擬信號的采集,同時向被控設備輸出模擬和數字控制信號。主控芯片各種資源的相關情況見參考文獻。
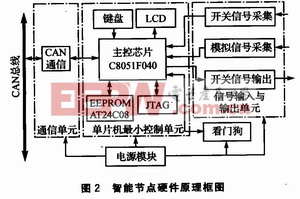
智能節點的硬件系統包括:模擬信號采集電路、開關信號采集電路、開關信號輸出、LCD電路、CAN總線電路等。硬件原理框圖如圖2所示。
2.1 模擬信號采集電路
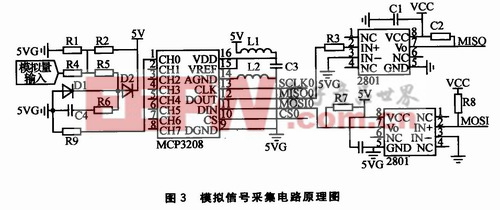
模擬信號采集電路用于采集受控設備輸出的模擬信號。該電路由模擬信號調整電路、SPI總線A/D轉換器MCP3208、高速光電耦合器2801以及外圍電路組成,其電路原理圖如圖3所示。
















評論