基于ARM設計的嵌入式數控系統方案

摘要:本文介紹了基于ARM的嵌入式數控系統。該系統為主從式結構,上位機以ARM9為核心,實現人機交互,下位機以ARM7為核心,結合FpGA實現機床的運動控制,上下住機通過CAN總線進行通信。
本文引用地址:http://www.104case.com/article/151188.htm傳統的數控系統通常是在通用計算機或工控機的基礎上加裝運動控制卡,使用Windows操作系統,并安裝昂貴的數控軟件構成的。此類系統成本高,功耗大,不太適合中小規模的應用場合。而嵌入式產品具有系統結構精簡、功耗低等特點,能彌補傳統數控系統的不足。
目前,嵌入式數控系統主要有兩種形式:完全依靠嵌人式處理器控制的系統以及嵌入式處理器和運動控制芯片相結合的系統。與前者相比,后者南于采用了專業的運動控制芯片,在實時性和精度等方面的表現更好,因而成為未來的一個發展方向。本文介紹了一種基于ARM控制器和FPGA運動控制芯片的主從式數控系統,希望能為AR M在嵌入式數控系統中的應用提供一些參考。
1 總體設計
本系統為主從式結構。上位機以S3C2410 ARM9控制器為核心,移植Linux系統和QT/Embedded圖形庫,主要實現G代碼文件處理、加工位置的顯示、手動控制等人機交互功能。下位機以$3C44B0 ARM7控制器為核心,斯邁迪的SM5004 FPGA芯片為運動控制器,實現電機驅動、冷卻液開關、緊急停止等機床控制功能。上下位機通過CAN總線通信。
2 硬件設計
2.1CAN接口設計
由于S3C2410和S3C44B0不帶CAN接口,所以必須對其進行擴展。S3C2410的CAN 擴展接El如圖1所示,S3CA4B0的CAN接口與其相似。
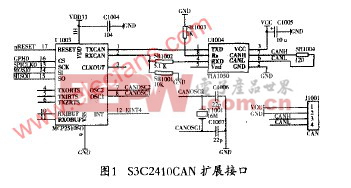
系統的CAN控制器使用MCP2510芯片。MCP2510的復位引腳RESET與$3C2410的復位引腳nRESET相連,片選引腳CS與S3C2410的GPH0相連。OSC1和OSC2引腳連接一個16M 的晶振作為時鐘源。SI、SO和SCK分別與S3C2410的SPI El MOSIO、MISO0和SPICLKO相連。如果SPI口被其它設備占用,也可用其它的I/O El代替,但要編寫軟件算法來模擬SPI的讀寫操作。系統采用中斷方式讀寫MCP2510,因此它的INT引腳與S3C2410的外部中斷引腳EINT4相連。在外部中斷引腳資源比較緊張的情況下,也可使用查詢方式讀寫MCP2510,此時INT可以懸空。
系統的CAN 收發器使用TJA105O芯片,該芯片的TXD和RXD與MCP2510的TXCAN和RXCAN相連,Rs引腳連接的斜率電阻為1K。
TJAlOS0輸出CANH、CANL差分信號,通過J1001插口接人物理線路。
2.2輸入輸出接口設計
S3C44B0 ARM 和SM5004 FPGA芯片提供了很多通用輸入輸出接口,為了有效的防止干擾進入系統,這里采用了光耦隔離,如圖2所示。
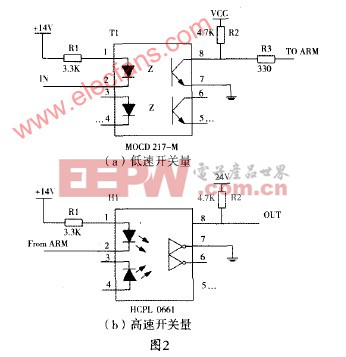
在低速開關量中,由圖2(a)可以看出,這里采用貼片低速光耦MOCD217一M。它是Motorola公司的產品,是具有低輸入電流的雙路光耦。之所以這里在接人輸入口之前加入電阻R3,是因為ARM 中的部分I/0 口是開漏式的,防止在輸入輸出過程中電流過大,將相應口燒壞。如圖2(b)在高速開關量中,采用HC—PL0661雙路光耦進行擴展,它是Agilent Technologies公司的產品,其開關速率可達到1O M左右,可應用于各種高速脈沖輸入輸出的場合。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)






評論