用插值查找表實現FPGA的DSP功能

內插步驟見圖3。“Reinterpret”模塊在不改變二進制表示法的情況下,可改變dx=x-x0信號。其重置了二進制小數點(從 UFix_6_0到UFix_6_6格式),并輸出nx-nb位二進制數的一個分數,從而計算出 (x-x0)/2-nb 的值。
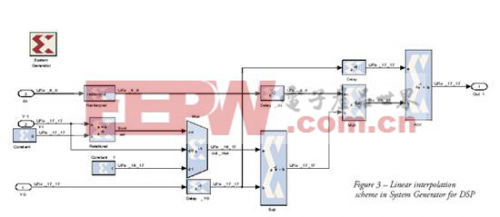
圖3 System Generator for DSP的線性內插圖
從硬件角度來看,這些模塊什么都不占用。總的來說(且根據我們通過ILUT方法應用的函數類型),如果y1=0且y0=0,我們可以強制y1- y0=1,這樣我們就可以得到1/2-nb而不是0。我們采用Mux、Rational、Constant和Constant1模塊來執行這項工作。剩下的Mult、Add和Sub模塊則執行線性內插公式。在本例中,我強制Mult模塊的輸出信號為17位分辨率,而非理論上要求的23位,因為總體數值精度對本試驗來說已經足夠。此外,由于y-sqrt(x) 函數呈單調遞增,因此所有結果都無符號。換句話說,不同的函數需要對數據類型進行不同的精心調整,但不會與圖3所示的原理相去甚遠。
假定我們以Spartan-3E 1200(fg320-4)為目標器件,現使用ISE設計套件和System Generator for DSP 10.1 SP3版工具對其進行布局和布線,結果其所占用的FPGA資源的總體情況如下:
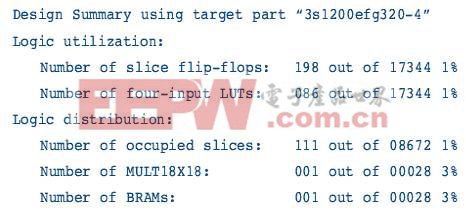
該設計完全流水線作業,可以在任何一個時鐘周期提供新的輸出。時延為10個時鐘周期,最大數據速率達194.70MSPS(每秒百萬采樣數)。從數值精度來說,對1000或2000字ILUT而言,參考浮點結果與System Generator for DSP定點輸出的量化誤差之間的比值,即信噪比分別為 71.94dB或77.95dB。
除ILUT外,我們還可應用賽靈思System Generator for DSP提供的Reference Math Blockset(參考數學模塊組)中的CORDIC SQRT模塊。在本例中,總時延為37個時鐘周期,最大數據速率達115.18 MSPS,區域資源占用為940片觸發器,總共有885個四輸入LUT,560個占用的芯片以及兩個MULT 18x18嵌入式乘法器。信噪比為40.64dB。這些結果顯示CORDIC是實施定點數學運算的理想方法,但ILUT在許多方面更加出色。
線性化非線性傳感器
目前許多企業在工業控制系統中使用“智能傳感器”,以滿足低占用面積、低功耗、高性能、最低成本以及最短開發時間等要求。通用智能傳感器可視為一個由傳感器及其信號控制線路、模數轉換器 (ADC) 、帶或不帶嵌入式處理器的相關DSP子系統組成的功能組件,所有這些功能塊都集成在的同一器件上,如圖4所示。
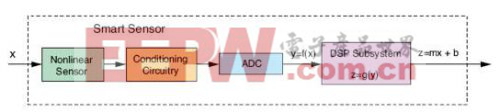
圖4. 智能傳感器的方框圖
智能傳感器的目的是將物理量(如電機中的電流)轉化為數字電路能夠處理的數字信號。構建這類傳感器所采用的技術及組件的某些特性通常會導致諸如失調、增益和非線性等誤差,進而導致總體傳遞函數呈非線性。
一般來說,客戶會校正他們產品中運行的DSP子系統所出現的上述誤差。如果 y=f(x) 是來自傳感器和ADC級聯的數字輸出信號,那么DSP必須執行其反函數g(y)=f-1(y) 來補償非線性函數,這樣總體輸出z即為:
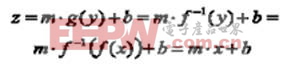
這是直線方程,其斜率為m,縱截距為b。
最簡單的線性化方法是LUT法,采用存儲在ROM中的傳感器校準點。不過,對16位的ADC來說,ROM顯得過大了,且需要64個BRAM單元。而內插LUT則不然,是一個良好的解決方案。
舉例來說,我們假定非線性傳遞函數是一條拋物線。下一 MATLAB分段碼說明了如何生成最終直線的m和b參數,以及如何計算 g(y)(即 f(x) 的反函數)。圖5用三種顏色顯示了三條不同曲線。請注意在計算 f(x) 的反函數 g(y) 過程中會丟失一些值。這是因為有幾個y值相同的點對應著不同的x點。因此,需要對 g(y) 進行平滑化,填補所有缺失的點。(為精確起見,我沒有把這部分運算包括在MATLAB分段碼中)

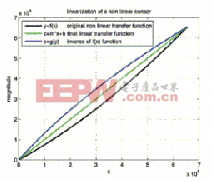
圖5.黑色拋物線表示非線性傳感器傳遞函數f(x) 的曲線;綠色直線表示線性化DSP子系統獲得的最終線性傳感器傳遞函數曲線;藍色拋物線則表示反函數g(y) 的曲線。
我采用非常類似于圖1-3的設計,在System Generator for DSP中運行基于定點周期的仿真,在非線性傳感器的總體輸出范圍內得到了92.48dB的信噪比。





評論