基于DSP+FPGA的紅外圖像小目標檢測系統設計

近年來,紅外探測系統因其具有隱蔽性,抗干擾性,全天候工作等特點,在現代戰爭中具有重要的作用,而紅外圖像中小目標的檢測將直接影響制導系統的有效作用距離及設備的復雜程度,在紅外成像制導和預警系統中發揮著舉足輕重的作用。
一般說來,由于小目標距離較遠,因而在成像系統中表現為微弱特性,并且沒有形狀和結構特征或特征不明顯。同時,由于高于絕對零度的物體均有紅外輻射能力,所以自然界中的干擾源很多,很難準確地檢測出真正的目標。
本文在數學形態學Top-hat算子對于目標檢測的基礎上,設計了一種基于DSP+FPGA的圖像實時處理系統,使其能夠滿足高速采樣數據流快速存取,快速運算的要求。
1 算法基礎
1.1 形態學算法
數學形態學方法是一種非線性濾波方法,它最先被用來處理二值圖像,后來被引用到灰度圖像處理。基本思想是:用一定的結構元素去度量和提取圖像中的對應形狀,去除不相干的結構,以達到圖像分析和目標識別的目的。
灰度形態學的基本運算有膨脹、腐蝕、開運算和閉運算。基于這些運算,可以推導和組合各種數學形態學使用算法。
設f(x,y)為輸入圖像,b(x,y)為結構元素,其中(x,y)為圖像平面空間的坐標點,f為(x,y)點的灰度值,b為(x,y)點的結構函數值,Df和Db分別是f和b的定義域,上述4種基本運算的表達式為:
![]()
其中,開運算有些像非線性低通濾波器,但是又與低通濾波器不同,開運算可以允許高頻部分中大于結構元素的部分通過。Top-hat算子就是利用了開運算的上述性質來進行目標檢測的。
Top-hat算子的定義為:
![]()
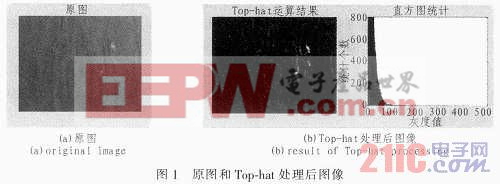
經過Top-hat處理后的圖像,目標和背景在能量上差別較大,大部分像素都集中在低灰度區,只有目標和小部分噪聲分布在高亮度區,如圖1所示,圖1(a)為原始圖像,圖1(b)為經過Top-hat處理的圖像及其直方圖統計結果。
1.2 最大類間方差法求閾值
設經過處理后的圖像f2(x,y)的各灰度的集合為S={0,1,2,…,N},Pi為此集合中i出現的概率,由于圖像是由小目標和背景兩部分組成的,設這兩部分對應的灰度子集分別為:紅外背景,C0={0,1,2,…,k};目標對象,C1={k+1,k+2,…,N};則兩個類別的間方差為:












評論