基于DSP的自動代碼生成及應用

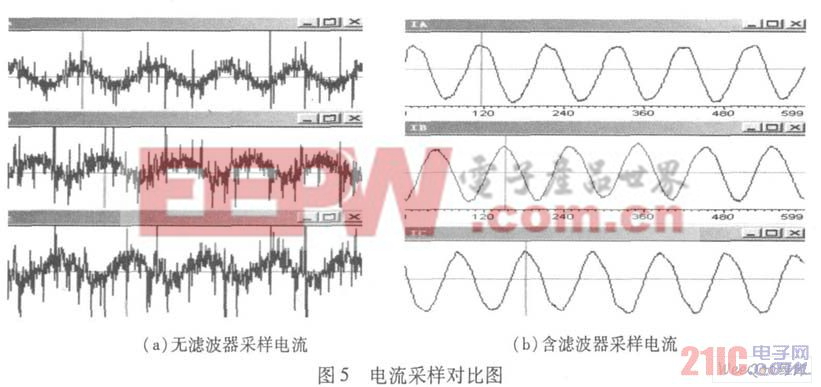
把修改完善后的代碼加載到DSP實驗板上, 對電機的電壓和電流進行采樣, 通過圖5可以驗證濾波器的效果。
在利用擴展卡爾曼濾波進行速度估算時, 以異步電機在兩相靜止坐標系下的電流Ia、Iβ、轉子磁鏈Φa、Φβ、以及轉速n 為狀態變量, 進行一系列計算,這樣就可以很方便的觀測到磁鏈圓如圖6( a)和估算的速度曲線如圖6( b)。在計算過程中, 由于采樣噪聲、系統噪聲、電機參數隨溫度變化等原因, 造成估算值在一定范圍內浮動, 但是基本穩定。
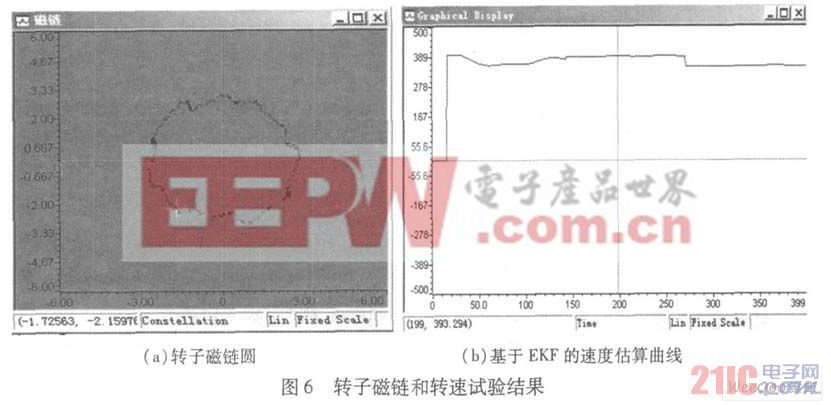
通過EKF完成了異步電機的速度在線辨識, 為以后建立異步電機無速度傳感器矢量控制系統奠定了基礎。
6 結束語
試驗證明, 應用M atlab對DSP進行實時調試和代碼生成, 有效地改變了傳統的設計方法。用M atlab快速建立T IDSP模型及直接生成C 語言程序的方法, 簡化了DSP 軟件的開發。在Embeddedtarget for TI C2000 工具箱中還包含其他工具, 如PWM 控制、CAN 總線控制及通用I /O 控制等。利用這些工具與Simu link中的其他工具相結合, 能夠完成復雜功能的DSP程序設計, 并且只需要進行少量修改, 就可以實現功能正確的C 語言程序設計,大大提高了程序開發效率。











評論