基于DSP的交流永磁同步直線電機矢量控制系統設計

4.軟件結構
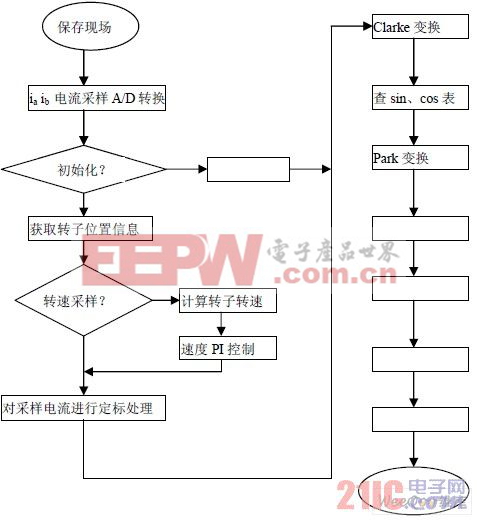
系統軟件包括軟硬件初始化程序、主程序、初始定位子程序、控制過程顯示程序和中斷服務子程序5個部分。系統復位后首先執行初始化程序,實現對DSP內部各功能模塊工作模式的設定和初始狀態的檢測;然后執行主程序,開啟定時中斷、外部保護中斷及初始定位子程序;獲得動子準確位置信息后,進入運行狀態,執行中斷服務子程序[5]。 系統的主要功能,包括電流大小的計算、速度位置信息和矢量變換,由中斷服務子程序來完成。根據系統運行原理設計其軟件結構。圖5為系統運行程序圖:
系統中斷子程序圖如圖4所示:
5 .結論
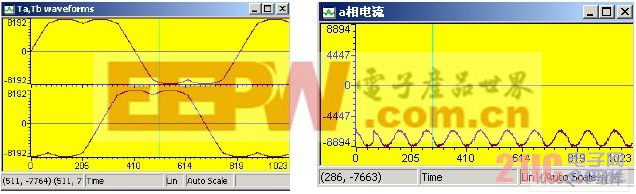
本文設計的算法程序已經初步調試成功,能夠實現基本運行,證明軟硬件設計的正確性。圖5所示為部分調試結果
由于直線電機端部效應及外部載荷直接加載等特點,使得對直線電機控制系統穩定提出了較高要求。為提高其控制的魯棒性,其算法還有待于繼續改進。必須采取合適的控制算法和控制策略,使系統動態響應快,抗干擾能力強,穩態跟蹤精度高。因此直線電機控制理論有待于進一步深入的探討與研究。

伺服電機相關文章:伺服電機工作原理
電荷放大器相關文章:電荷放大器原理








評論