基于DSP的覆冰機器人控制系統研究

方案中,假設已知發送節點的發射功率,接收節點可以根據接收信號的強度,計算二者之間距離的近似值;發射功率可控,即節點可以根據自身需要調整發射功率。采用與文獻[5]相同的無線傳輸能量消耗模型。ADEECS協議按輪執行,每一輪分為網絡部署,簇頭選舉,成簇,數據傳輸這4個階段。
具體實現過程如下:
階段1:網絡部署階段在網絡部署階段,讓基站以一定的功率向網絡內廣播一個消息HELLO_MSG。傳感器節點根據接收信號的強度計算出自己到基站的近似距離,在與基站通信時,依據這個距離選擇適當的發射功率。在成簇階段,還將利用這個信息來均衡簇頭的負載。
階段2:簇頭選舉階段全局范圍內預先設定一個0~1之間的閾值T,用來控制參加簇頭競選的節點比例。每一個節點生成一個0~1之間的隨機數,記為u。若u
式中:T為最大約定的最大延遲時間;Eresidual為節點剩余能量;Eini是節點原始能量。
階段3:成簇階段簇頭向網絡所有節點廣播自己成為簇頭的消息HEAD_AD,內容為簇頭節點的標識及該節點與基站的距離。普通節點接收到此消息后選擇一個通信代價cost(CH)最小的聚類加入,并發送消息JOIN_REQ。通信代價表達式為:

式(5)中參數與式(2)和式(4)表示的意義相同。從式(5)可以看出,該通信代價綜合考慮了節點與簇頭的距離、簇頭與基站的距離及簇頭的剩余能量。從而實現了由聚類成員節點選擇剩余能量較大,與自己距離較近,與基站距離較小的簇頭形成簇,達到能量均衡的目的。
階段4:數據傳輸階段簇頭向所有成員節點廣播TDMA通信時隙調度信息TDMA_SCHEDULE。成員節點按分配好的TDMA時隙在某個時刻將自己檢測到的數據發送給簇頭。簇頭在接收聚類成員發送數據的過程中進行數據融合,并將融合后的數據直接傳輸給基站,該過程采用單跳的通信方式。
4 ADEECS協議仿真與分析
仿真中,使用Matlab作為仿真平臺,采用與文獻[3]相同的能量消耗模型。仿真參數如表1所示。
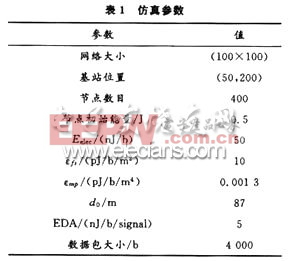
文中將ADEECS與EECS和LEACH協議性能進行仿真對比。
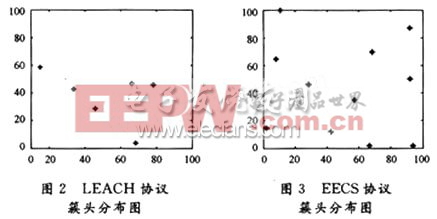
4.1簇頭分布的仿真對比
LEACH簇頭個數取最優值。在仿真中,LEACH簇頭個數為6;取T=0.15,R=26,w=0.8。由3種協議的簇頭分布圖(圖2~圖4)可以看出,LEACH協議簇頭隨機分布;EECS協議簇頭分布比較均勻,但存在簇頭漏洞問題;ADEECS協議簇頭真正實現了均勻分布。所以,提出的延遲發送競選消息的方法很好地解決了LEACH和EECS協議在簇頭選舉過程中存在的問題。











評論