基于DSP的穩定平臺設計

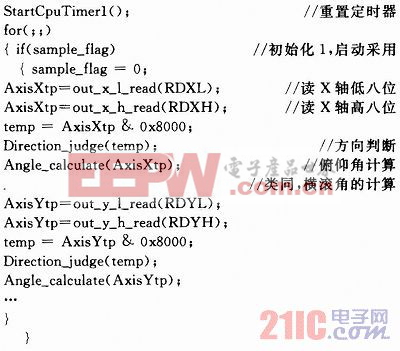
橫搖調整及縱搖調整在一個周期內完成相應的平臺姿態調整之后,因等待定時中斷發送的消息郵箱而掛起,待下一個消息到來之后再一次對平臺姿態進行周期性的調整,保持平臺在周期范圍內的穩定。系統中數據采集與處理的部分關鍵代碼如下所示。
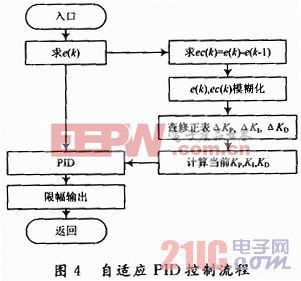
自適應PID控制程序實現流程圖如圖4所示。本文引用地址:http://www.104case.com/article/149689.htm
4 結語
本文通過嵌入式控制系統的搭建,實現了穩定平臺隔離海水運動的目的。該穩定平臺以DSP TMS320F28335為核心微處理器,使用多傳感器測量技術,對兩自由度上實行模糊自適應PID控制,并通過架設嵌入式操作系統μC/OS-Ⅱ來管理并行橫搖及縱搖任務,通過搖擺臺的模擬實驗,該穩定平臺在穩定性上達到了預期的要求。

伺服電機相關文章:伺服電機工作原理
加速度計相關文章:加速度計原理








評論