基于DSP的穩(wěn)定平臺(tái)設(shè)計(jì)

摘要:為了消除海水運(yùn)動(dòng)對(duì)需要保持穩(wěn)定姿態(tài)物體的影響,設(shè)計(jì)了兩軸穩(wěn)定平臺(tái)。該穩(wěn)定平臺(tái)以TMS320F28335DSP為核心微處理器,采用了多傳感器采集、伺服控制技術(shù)等;并架設(shè)了嵌入式操作系統(tǒng)μC/OS-Ⅱ來(lái)管理多任務(wù)穩(wěn)定平臺(tái)系統(tǒng)。實(shí)驗(yàn)結(jié)果表明,該兩軸穩(wěn)定平臺(tái)在穩(wěn)定性及動(dòng)態(tài)性能上均能滿足要求,起到了隔離海水運(yùn)動(dòng)的目的。
關(guān)鍵詞:穩(wěn)定平臺(tái);DSP;捷聯(lián)慣性系統(tǒng);μC/OS-Ⅱ
0 引言
在海面上要求保持物體水平狀態(tài)時(shí),由于海浪的影響,將導(dǎo)致物體的姿態(tài)隨海浪的波動(dòng)而變化。兩軸穩(wěn)定平臺(tái)的設(shè)計(jì)正是基于隔離海水運(yùn)動(dòng)的目的,在平面內(nèi)保持物體的水平狀態(tài)。隨著傳感器技術(shù)、嵌入式控制技術(shù)等多項(xiàng)技術(shù)的應(yīng)用,穩(wěn)定平臺(tái)也得到了廣泛的發(fā)展。國(guó)外在穩(wěn)定平臺(tái)方面的發(fā)展已經(jīng)趨向小型化、數(shù)字化、集成化。近年來(lái)我國(guó)對(duì)穩(wěn)定跟蹤平臺(tái)的研究也開(kāi)始增多,有多個(gè)科研單位對(duì)穩(wěn)定跟蹤平臺(tái)開(kāi)展研究,已經(jīng)在國(guó)防、科研及民用各領(lǐng)域發(fā)揮了重要作用。該機(jī)載穩(wěn)定平臺(tái)通過(guò)嵌入式DSP系統(tǒng)的運(yùn)算及控制,建立了測(cè)量與控制系統(tǒng)。以μC/OS-Ⅱ操作系統(tǒng)來(lái)管理多任務(wù)平臺(tái),從而實(shí)現(xiàn)了穩(wěn)定平臺(tái)的智能化、穩(wěn)定性、快速和精確性。
1 系統(tǒng)原理
穩(wěn)定平臺(tái)的工作原理為通過(guò)姿態(tài)測(cè)量得出當(dāng)前實(shí)時(shí)姿態(tài)信息,通過(guò)驅(qū)動(dòng)伺服電機(jī)的轉(zhuǎn)動(dòng),調(diào)節(jié)上平臺(tái)面達(dá)到穩(wěn)定姿態(tài)。當(dāng)平臺(tái)受海水運(yùn)動(dòng)所產(chǎn)生的力矩干擾,其姿態(tài)會(huì)發(fā)生變化,偏離穩(wěn)定位置,通過(guò)姿態(tài)測(cè)量可以得出橫滾角及俯仰角信息。姿態(tài)測(cè)量系統(tǒng)布局在穩(wěn)定平臺(tái)的上平臺(tái)面,隨著上平臺(tái)面的運(yùn)動(dòng)而運(yùn)動(dòng)。受上平臺(tái)面尺寸方面的限制,系統(tǒng)布局如圖1所示。
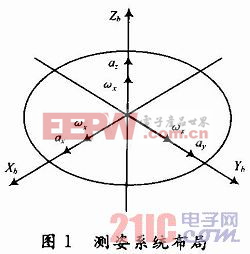
捷聯(lián)慣性測(cè)量系統(tǒng)采用三陀螺、三加速度計(jì)組合的方式,構(gòu)成了測(cè)姿系統(tǒng)的載體坐標(biāo)系:其中ax,ay,az分別為三加速度計(jì)在載體坐標(biāo)系三正交軸的加速度輸出,ωx,ωy,ωz分別為三陀螺儀在載體坐標(biāo)系三正交軸上的角速度輸出。
傳感器的布局設(shè)計(jì)構(gòu)成了測(cè)姿系統(tǒng)的載體坐標(biāo)系,而最終的平臺(tái)姿態(tài)信息是相對(duì)于地理坐標(biāo)系來(lái)說(shuō)的,所以必須將測(cè)得的載體三軸向加速度和載體三軸向角速度轉(zhuǎn)換到地理坐標(biāo)系。
在上平臺(tái)面初始靜態(tài)條件下,三加速度計(jì)輸出值與重力加速度之比的反余弦值即為載體的初始狀態(tài)值,定義為俯仰角θ0和橫滾角γ0。得出初始姿態(tài)之后,便根據(jù)三陀螺儀輸出的三角速度ωx,ωy,ωz進(jìn)行姿態(tài)解算。姿態(tài)矩陣解算采用最典型的四元數(shù)法。四元數(shù)法中,載體坐標(biāo)系相對(duì)地理坐標(biāo)系的轉(zhuǎn)動(dòng)可以看作是剛體定點(diǎn)轉(zhuǎn)動(dòng),其基本表達(dá)式用來(lái)轉(zhuǎn)動(dòng)四元數(shù)Q來(lái)表示,即:
![]()
式中:q0,q1,q2,q3為轉(zhuǎn)換系數(shù);i,j,k為三軸轉(zhuǎn)換向量。故要求載體坐標(biāo)系到地理坐標(biāo)系的轉(zhuǎn)換矩陣,需要解下列四元數(shù)運(yùn)動(dòng)方程:
![]()
式中:Q為四元數(shù)矢量矩陣,用以描述載體坐標(biāo)系相對(duì)于地理坐標(biāo)系的姿態(tài)變化量;W(ω)為載體坐標(biāo)系相對(duì)地理坐標(biāo)系的轉(zhuǎn)動(dòng)角速度在載體坐標(biāo)系上的投影,也就是前面解算出來(lái)的載體三個(gè)軸向上的角速率。


伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理
加速度計(jì)相關(guān)文章:加速度計(jì)原理








評(píng)論