基于DSP和FPGA的導航計算機系統設計

摘要:為提高導航的精度和實時性,設計了基于DSP和FPGA的導航計算機模塊,成功實現了低成本、小型化的捷聯慣性導航系統。通過描述硬件的設計原理和軟件的框架及流程,簡要介紹了系統的設計和實現方法。經驗證,該系統達到了導航定位的性能和精度要求,姿態、位置和速度等參數可以有效融合多傳感器的導航信息,能滿足導航計算機在處理能力、體積、功耗和適應性等方面的要求。
關鍵詞:導航計算機;DSP;FPGA;導航定位
0 引言
慣性導航系統是隨慣性傳感器(陀螺儀和加速度計)技術的發展而發展起來的一門導航技術,由于具有完全自主,不受任何干擾,隱蔽性強,輸出信息量大,輸出信息實時性強等優點,在軍事領域和民用領域都得到了廣泛的應用,已被許多機載設備選為標準導航設備。特別是現代戰爭所面臨的電磁環境日益復雜,對慣性導航技術的依賴和要求也越來越高,慣性導航技術已經成為現代高科技戰爭中一項重要支撐技術而受到各國的關注。為了保證飛機按照預定的航線進行飛行,對各種數據進行實時精確處理顯得非常關鍵,因此研制具有可靠性高,運算精度高,性能先進等特點的新一代導航計算機已成為必然。
1 導航計算機系統組成
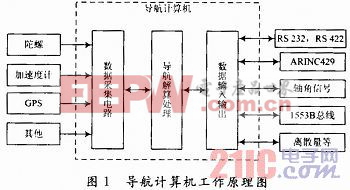
導航計算機是慣性導航系統的核心功能單元之一,配套應用于慣性導航系統的總體中。導航計算機采用嵌入式計算機設計技術、智能接口技術及高精度組合導航技術,配置高性能DSP處理器和大容量存儲器,利用大規模現場可編程門陣列(FPGA)設計,使用集成軟件開發環境開發程序實現高速板內總線對接口的高速訪問。由處理器通過接收陀螺、加速度計、GPS等其他傳感器的輸入數據進行導航解算、誤差補償等運算處理,獲得航向、俯仰、滾動角、三軸角速率、速度、經緯度、高度等導航所需的參數信息。
作為導航系統核心部件的導航計算機負責從數據采集電路獲取導航原始數據,進行捷聯導航算法處理,最后將解算得到的導航結果進行輸出控制。系統工作原理如圖1所示。
2 導航計算機硬件組成
導航計算機采用GPS衛星導航與慣性導航相結合,采用松耦合方式進行互聯,在保證系統間信息交換能力的前提下考慮系統的組合性和靈活性。為提高系統的實時性、集成度和擴展性,硬件設計上采用DSP+FPGA的解決方案。
DSP芯片主要完成復雜的數學運算,包含誤差補償、初始對準和導航運算等;FPGA芯片完成所有外圍接口,包括陀螺、加速度計的高速采樣和I/O接口等各傳感器信號的采集,通過信號處理電路送至處理器芯片進行運算處理,將解算到的慣性測量信息通過數據接口控制輸出。導航計算機硬件組成如圖2所示。
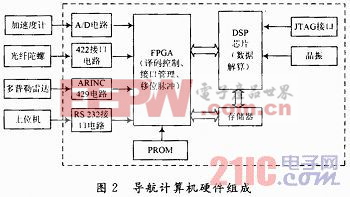
為保障系統具有大規模數據處理能力,同時具有實時性的特點,導航計算機的核心器件選用了TI公司推出的高速浮點處理器DSP芯片TMS 320C6713。作為導航計算機的核心控制部件,該芯片工作的主頻為200 MHz,單指令執行周期為5 ns;定點浮點運算能力強大,運算速度能達到1 600 MIPS/1 200 MFLOPS。作為數據運算系統,TMS320C6713不僅保證了導航運算的速度和精度,同時豐富的系統應用外設及多種標準接口,方便導航計算機與外部傳感器進行數據交互。快速的中斷處理性能可保障導航計算機多個接口的傳輸速率。
為滿足多個數據接口的數據傳輸需要,采用XILINX公司的現場可編程門陣列FPGA芯片XQ4013E4PG223M,設計完成了系統的復位功能、邏輯譯碼功能、外部接口管理和移位脈沖計數功能。FPGA芯片的使用,方便了功能電路的集成,在不增加硬件電路的情況下,通過模塊化的VHDL設計,適應了導航功能電路的變化。通過采用基于VHDL的計數脈沖濾波、采樣及自測試技術,提高了輸入信號的采集精度,對提高整個激光捷聯慣導系統的定位精度提供了支撐,實現了高精度、通用化和小型化。
慣性器件的輸出信號采樣頻率決定了捷聯解算的精度和速度。根據實時性要求,系統每1 ms采集一次陀螺脈沖和加速度計的數據,DSP芯片每10ms進行1次導航數據解算。因此選用高效的AD1674和OP200電路對加速度計采集到的信號進行模數轉換,將采集到的0~5V電壓信號轉換為數字信號,存儲于內部數據緩沖區內供DSP芯片進行數據處理。AD1674是12位A/D轉換器,具有10 V參考輸入,時鐘輸入和三態輸出的微處理器接口,具有采樣/保持功能,可對快速傳輸的交/直流信號進行直接轉換,轉換時間不大于15μs。AD1674芯片可以在兩種模式下工作,全控制模式和獨立模式,設計中選用獨立工作模式,數據轉換由R/C信號控制。
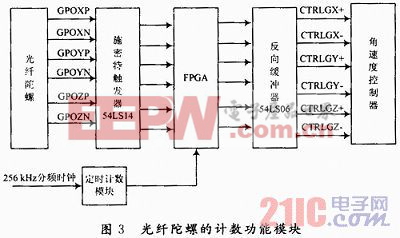
光纖陀螺輸出信號是脈沖信號,x,y和z軸分別輸出正反2路信號,信號為GPOXP,GPOXN,GPOYP,GPOYN,GPOZP,GPOZN。定時周期內正反信號脈沖個數的差和標度因數的積即為該軸向陀螺的角速度。光纖陀螺的計數功能模塊如圖3所示。

fpga相關文章:fpga是什么










評論