基于ARM的電腦鼠控制系統(tǒng)研究

2.4 紅外檢測(cè)模塊
紅外檢測(cè)模塊主要負(fù)責(zé)迷宮環(huán)境監(jiān)測(cè)和處理。紅外線經(jīng)調(diào)制后由發(fā)射管發(fā)出,接收管接收迷宮墻壁反射光,根據(jù)接收反射信號(hào)強(qiáng)弱來判斷與隔墻的距離。本系統(tǒng)相對(duì)傳統(tǒng)紅外檢測(cè)方法做如下特點(diǎn):
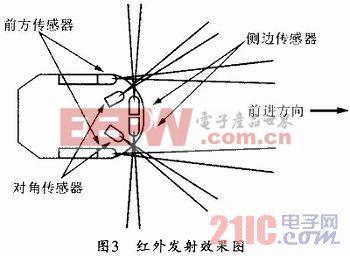
(1)紅外傳感器由原來的5組增加到6組。除了正前、正左、正右以及正前方兩個(gè)45度斜角外,正前方增加1組紅外傳感器,通過正前方兩組傳感器信息的融合實(shí)現(xiàn)路口45度斜走,相對(duì)于以往的90度直角調(diào)整,節(jié)約了時(shí)間,提高了效率。
(2)采用基于雙T選頻網(wǎng)絡(luò)的放大器設(shè)計(jì),紅外傳感器根據(jù)反射信號(hào)的強(qiáng)弱實(shí)現(xiàn)電腦鼠與障礙物之間的測(cè)距。以往使用的是一體化紅外接收傳感器(如IRM8601S),其接收頭內(nèi)部集成自動(dòng)增益控制電路、帶通濾波電路、解碼電路及輸出驅(qū)動(dòng)電路,但由于檢測(cè)信號(hào)輸出的是數(shù)字信號(hào),只能判斷有或無障礙物,不能根據(jù)檢測(cè)信號(hào)輸出的強(qiáng)度計(jì)算距離。本設(shè)計(jì)中采用基于雙T選頻網(wǎng)絡(luò)和TLC084組成的選頻放大設(shè)計(jì),實(shí)現(xiàn)頻率不同增益不同,對(duì)有用信號(hào)進(jìn)行放大處理,濾除或抑制無用信號(hào)。
(3)發(fā)射三種頻率調(diào)制波,減少信號(hào)之間的干擾。6組傳感器分為三組,正左和正右兩組傳感器負(fù)責(zé)檢測(cè)電腦鼠是否走在中線上,以便及時(shí)做出姿勢(shì)校正;左前方和右前方兩組傳感器主要檢查前方是否有路口;前方兩組傳感器配合電機(jī),協(xié)同工作實(shí)現(xiàn)45度轉(zhuǎn)彎。紅外光發(fā)射頻率越高,傳播距離相對(duì)越遠(yuǎn),在本設(shè)計(jì)中由于迷宮墻壁之間距離16.8cm(單元格18cm.墻壁厚度1.2cm),而電腦鼠的寬度一般為10cm左右,車體距兩邊墻體的距離只有3cm左右,所以正左方和正右方發(fā)射頻率選擇為33kHz,左前方和右前方發(fā)射35kHz,正前方距離最遠(yuǎn),發(fā)射頻率為38kHz。具體如圖3所示。










評(píng)論