基于DSP的PMSM矢量控制系統的設計與研究

控制電路由上位機、TMS320F2812、光電編碼器、霍爾傳感器等組成。其中上位機與DSP通過JTAG模塊連接,可實現兩者間的實時通信:QEP模塊連接光電編碼器,用來捕獲電機轉速信息,并由數碼管模塊顯示;A/D模塊與霍爾傳感器相連,用來檢測電路中電壓、電流值的大小;事件管理器模塊輸出6路PWM波,經光耦隔離、功率驅動電路,輸出到逆變電路的6個IGBT開關管。
3.1 A/D采樣精度分析
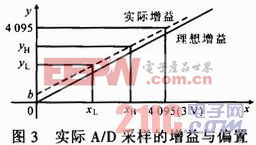
TMS320F2812片內A/D模塊分辨率為12位,但在實際應用中精度并不高。理想情況下,A/D的采樣結果為:y=Gx+b。其中,y為采樣結果;x為輸入電壓;G為增益,G=1;b為偏置,b=0。但是在采樣過程中,G并不等于1,b也不等于0,其偏差如圖3所示。本文引用地址:http://www.104case.com/article/149265.htm
由于A/D采樣結果的準確性將直接影響電機控制性能,因此有必要采用矯正電路來提高其轉換精度,該系統設計的矯正電路如圖4所示。
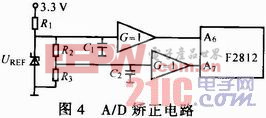
對于同一個排序器。其8個通道的G和b是相同的,如果給定兩個通道(如A6,A7)的輸入電壓,則有:y6=Gx6’+b’,y7=Gx7+b’。由圖4可知,A6,A7的給定是通過穩壓管和電阻分壓得到的,其電壓值是已知的,意即x6和x7是已知的。y6和y7可從A/D結果寄存器中讀取,由y6和y7,的表達式可以計算得到:
![]()
得到G’和b’后,就可通過y=Gx+b計算矯正后的采樣結果。










評論