基于ARM-Linux的電子控制油門設計

2.1 系統設計流程
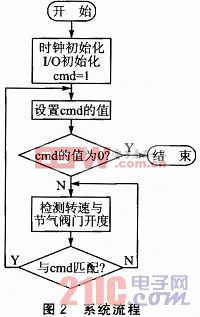
系統流程如圖2所示。控制器S3C2410完成各項初始化工作,接收來自操作人員的cmd指令,根據cmd的值來進行一系列的處理,包括停止執行器、旋轉多少角度等。然后通過節氣門開度傳感器和轉速傳感器計算出等效的cmd值,并與cmd進行比較以決定是進行下一次cmd的判斷,還是涮整執行器的角度。本文引用地址:http://www.104case.com/article/149115.htm
2.2 設置Linux系統時鐘頻率
為了降低電磁干擾和降低板間布線要求,芯片外接的晶振頻率通常很低,通過時鐘控制邏輯的PLL提高系統時鐘。在三星公司的S3C2 410A手冊中列出了推薦的幾種時鐘頻率,這里我們選用輸出時鐘頻率FCLK=202.80 MHz的配置,即PLL控制寄存器中的:MDIV=161(0xa1)、PDIV=3、SDIV=1。
在U-Boot的board/smdk2410/smdk2410.c中進行設置:
由以上程序可知FCLK=202.80 MHz,HCLK=101.40 MHz,PCLK=50.70 MHz,而S3C2410的PWM模塊使用的時鐘是PCLK,所以PWM的輸入時鐘為50.7MHz。











評論