采用CPLD與μC/OS -Ⅱ的斷路器智能控制單元設計

本文引用地址:http://www.104case.com/article/148966.htm

優先級最高的是開始任務(TaskStart),這是系統啟動后運行的第1個任務。在該任務中要完成系統及相關外設的初始化,并進行必要的自檢測,然后創建其余的各個任務。在完成其余各個任務創建之后,該任務要刪除自己,把系統資源讓給其他任務,整個系統開始正常運行。該任務的示意代碼如下:
/*系統及外設初始化*/
/*系統自檢測*/
/*創建各個任務*/
StartCpuTimer2();/*啟動時間片*/
OSStatInit();/*統計任務初始化*/
KickDog();/*WatchDog復位*/
OSTaskdel(OS_PRIO_SELF);/*刪除開始任務*/
除了TaskStart()之外,其余各任務模塊的結構都是無限循環體,圖3給出了一般任務流程圖。
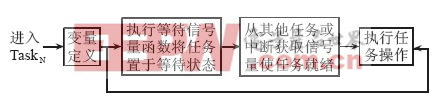
圖3 任務流程圖
任務通信與同步
μC/OS-Ⅱ提供了5種用于數據共享和任務通信的方法:信號量、郵箱、消息隊列、事件標志及互斥型信號量。信號量可以控制共享資源的使用權,也可以協調外部事件與任務的執行,提供了任務間通信、同步和互斥的最快通信,μC/OS-Ⅱ提供了3種類型的信號量,即二進制型、計數型和互斥型。事件標志可使任務與多個事件同步,若與多個事件的任何一個同步,稱為獨立型同步;若與多個事件都同步,稱之為關聯型同步。郵箱是一種通信機制,它可以發送一個指針型的變量,該指針指向一個包含了特定消息的數據結構。消息隊列是另一種通信機制,它可以使一個任務或中斷服務子程序向另一個任務發送以指針定義的變量,具體應用不同,每個指針指向的數據結構也不同。互斥型信號量是一種特殊的二進制型信號量,主要用于解決內在的互斥問題,減少實際應用中所必需的優先級翻轉。在設計智能控制單元軟件時,充分利用了μC/OS-Ⅱ提供的這些通信機制,以協調各獨立任務的運行。
通信協議的實現
F2812提供了標準的CAN2.0B總線協議,而此協議是一種物理層協議,因為該智能控制單元用于電力系統控制中,電力系統通用的應用層協議主要有CDT,MODBUS,DNP3.0等,在本設計的過程中應用層的協議將采用MODBUS協議,通信協議的實現比較復雜,但是由于采用了實時操作系統,通信協議的實現可以由操作系統統一管理,主要由數據的接收、發送、打包、解包任務完成。
總結
a.設計中使用具有多外設的新型高性能DSPTMS320F2812芯片,大大減少了系統硬件設計的工作量,縮短了開發周期。設計中采用了DSP最小系統與調理電路分開設計的方法,并且在DSP最小系統設計中采用多層板結構,并大量使用了貼片元件,以提高系統的穩定性及電磁兼容性。
b.作為基于優先級調度的嵌入式操作系統, 任務優先級的合理分配對系統的正常運行至關重要。在本設計中,對任務優先級的分配首先考慮是滿足系統實時性,其次在同等條件下再考慮任務的執行頻度,通過反復調整,最終確定優先級的分配表1。
c.本課題利用了基于CPLD的執行電路設計,由于CPLD的內部硬件結構的可靠性及快速的反應,非常適合電力系統控制,因此采用全CPLD(或ACTELFPGA)應是一個研究方向。
d.F2812作為TI公司推出的2000系列的新成員,目前在國內的開發和設計還處于摸索階段,本文中所提出的基于TMS320F2812+μC/OS-Ⅱ的系統設計思想會對F2812的學習和使用起到一定的促進作用。

斷路器相關文章:斷路器原理
高壓真空斷路器相關文章:高壓真空斷路器原理 漏電斷路器相關文章:漏電斷路器原理








評論