基于CAN總線的嵌入式車燈監控系統設計

3.1.1 CAN節點初始化
系統的主要任務是實現上位機與下位機之間的通訊,將下位機節點采集到的電壓電流參數上傳至上位機并顯示給用戶,實時反映車燈的工作狀況。因此CAN通訊任務具有最高級別的優先級。在任務taskican中,首先完成CAN節點的初始化,包括端口初始化、設定波特率、設置驗收濾波等,初始化通過調用Stellaris外設驅動庫中的相應函數來完成。函數SysCtlPeripheralEnable()和GPIOPinTvpeCAN()可完成CAN模塊外設的端口初始化,CANSetBitTiming()可以設定波特率,本設計中的通訊波特率設定為1 MB/s,并且總線上的節點都設置成相同的波特率,canAcceptFilterSet()可完成驗收濾波設置。完成CAN節點的初始化之后,在任務taskican中每10 ms調用一次iCAN調度函數ICAN_Sche dul(),完成一次數據收發工作,同時將下位機節點采集的電壓電流值上傳至上位機并刷新顯示。
3.1.2 基于iCAN協議的消息處理
iCAN協議,即工業CAN-bus應用層協議。是由我國自主研發的基于CAN總線的高層應用協議,詳細的定義了CAN報文中ID以及數據的分配和應用,建立了一個統一的設備模型,定義了設備的I/O資源和訪問規則,采用“基于連接,面向節點”的通訊方式,既支持主從方式通訊模式,又支持事件觸發通訊模式。系統中,上位機主節點的ID為0x01,下位機各節點的ID可以根據具體情況設定,范圍為0x00-0x3F。
節點中,數據的發送和接收是由微處理器集成的CAN控制器自動完成。為滿足實時性的要求,數據的接收操作采用中斷方式。由于下位機節點數量較多,數據的發送接收量比較大,為了保證不丟失數據,這里設計了兩個深度為40字節的CAN報文緩沖區,分別用作發送和接收緩存。對緩沖區的操作,由函數canCirBufRead和函數canCirBufWrite來完成。而對于CAN消息的發送和接收由函數ICANTxMsgObjSend、canFr ameSend和ICANRxMsgObjExplain來完成。
CAN消息的發送接收流程圖如圖5所示。數據的發送調用函數ICANTxMsgObiSend,其中先按照iCAN協議規定的格式填寫報文的ID和數據段,然后查詢緩沖區的狀態,如果發送緩沖區未滿,則調用canCirBufWrite將整合后的數據寫入發送緩沖區,最后調用函數canFrameSend將數據發送到CAN總線上。本文引用地址:http://www.104case.com/article/148494.htm
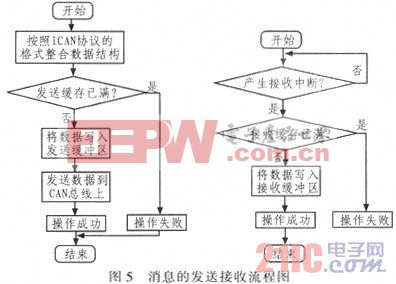
接收采用中斷方式,當有中斷產生,即收到一幀數據,此時首先查詢接收緩沖區的狀態,如果未滿,則調用函數canCirBufWrite將接收到的數據寫入接收緩沖區。







評論