基于CAN總線的嵌入式車燈監控系統設計

2.2 CAN通訊模塊設計
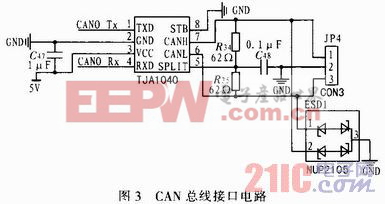
CAN通訊接口可實現各個節點與上位機之間的通訊,從而完成數據的共享和命令的收發[1]。LM3S2965有兩個兼容CAN2.0A/B的CAN控制器,可以實現數據鏈路層的功能,為實現物理層,這里只需要增加一個CAN收發器。Philips公司的TJA1040是一款通用的高速CAN收發器,它可將CAN控制器的邏輯電平與CAN總線上的差分電平進行相互的轉化,同時具有優秀的EMC性能,可靠性高。本節點中,CAN接口電路如圖3所示,微處理器內置的兩個CAN控制器分別與TJA1040連接,一路與CAN總線相連,完成與上位機的通訊;另一路與車燈相連,完成與車燈之間的通訊,實現對車燈的控制。本文引用地址:http://www.104case.com/article/148494.htm
2.3 電源模塊設計
電源模塊可對供電電源進行凈化處理,濾除高次諧波,避免供電電源對主控單元形成干擾。嵌入式系統的性能在很大程度上取決于電源電路的穩定性和可靠性,因此設計穩定可靠的電源模塊非常重要。本節點中,LM3S2965的電源輸入分為模擬輸入和數字輸入兩種,電壓為+3.3 V;CAN收發器TJA1040采用+5 V的供電電壓。首先采用穩壓器將外部直流輸入電壓穩壓成5 V供給CAN收發器工作,然后用LT1086CM-3.3將5 V電壓轉換成+3.3 V供給微處理器工作。由于模擬電源和數字電源本身的性質差異,為保證這兩種電源不會相互影響,這里在模擬電源和數字電源間用電感進行隔離。
3 系統軟件設計
系統的軟件部分由上位機軟件和下位機軟件組成。上位機完成對系統功能參數的設置以及顯示各車燈的電壓電流;下位機軟件主要完成基于iCAN協議的總線通訊,實時傳遞車燈的工作情況。
3.1 下位機軟件設計
下位機軟件設計流程圖如圖3所示,包括操作系統μCOS-II、節點初始化、外設驅動程序以及應用程序。
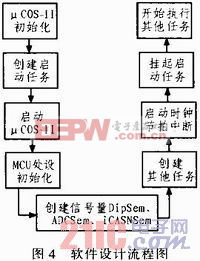
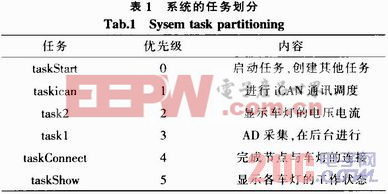
操作系統μCOS-II是系統運行的核心部分,完成任務的調度、時間管理和資源管理,在操作系統源碼中通過對OS_CPU_C.C、OS_CPU_ A.ASM和OS_CPU.H 3個文件中與微處理器相關的數據類型和處理函數進行修改和重新編寫后,便可將μCOS-II植入LM3S2965。初始化代碼完成對MCU外設、μCOS-II操作系統以及CAN節點的初始化。應用程序在操作系統的基礎上,分配任務堆棧空間,然后建立任務間通訊的信號量以及消息郵箱等,進而創建任務,并分配不同的優先級,此系統的任務劃分如表1所示。







評論