基于AVR的激光測距機綜合性能檢測設備設計

由于傳統的激光測距性能檢測必須到室外對目標靶進行檢測,并且受到天氣條件的限制,使得技術普查和日常維護受到很大的制約。為了克服以上問題,筆者設計了一種基于AVR單片機的激光測距機綜合性能檢測設備,借助該設備,對不同型號的激光測距機完成測距精度、測距能力、測距邏輯、單脈沖能量等的數字化檢測,大大提高了檢測效率和測試精度。
本文引用地址:http://www.104case.com/article/148243.htm1 設計方案
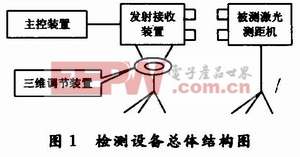
本方案的基本思想基于模擬激光測距機的工作原理和激光傳輸過程,激光測距機在工作時,首先從其發射通道發射一激光脈沖,經過大氣傳輸照射在被測物體上,然后漫反射,激光測距機的接收通道接收到漫反射的激光回波,激光測距機內部安裝有激光脈沖的發射、接收和計時模塊,根據激光脈沖從發射到返回的時間可以計算出其走過的距離,從而得到被測目標和激光測距機之間的距離。而本方案的綜合性能檢測設備與激光測距機的接收、發射通道相對應,分別提供發射、接收通道,檢測設備內部也相應設置計時模塊,實現相對應一定距離上的目標回波時間、能量的雙重模擬,即可由檢測設備代替目標模擬回波脈沖,實現激光測距機測距性能的自動化、數字化檢測,綜合性能檢測設備總體構成如圖1所示。
2 系統結構框圖
綜合性能檢測設備電路原理框圖如圖2所示。
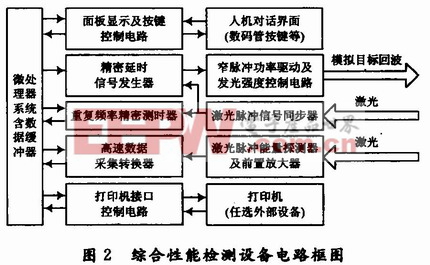
主要包括微處理器系統、面板顯示及按鍵控制電路、精密延時信號發生器、窄脈沖功率驅動及發光強度控制電路、精密測時器、激光脈沖同步器、激光脈沖能量探測器及前置放大器、高速數據采集轉換器及打印機控制電路等。
3 關鍵技術
3.1 “雙頻雙光路耦合”法實現激光測距性能的綜合測試
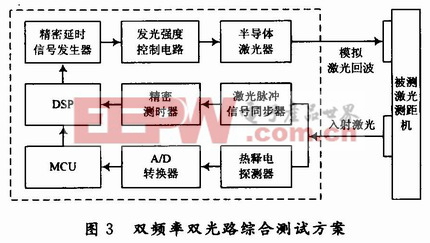
本方案的基本思想是將目標漫反射的遠方目標回波由半導體激光器模擬,當模擬該回波的光譜和空間特性后,即可驅動激光器的邏輯單元工作。而激光脈沖相應距離上的飛行時間則由精密延時模塊實現。這樣將激光脈沖在空間的延遲特性轉換為時間特性,從而將遠方目標從一定距離拉近到被測儀器前端,代替了激光測距機性能檢測必須要有遠方的實際合作目標的傳統檢測方法。如圖3所示。






評論