基于ARM處理器和CAN總線的電子結算終端設計

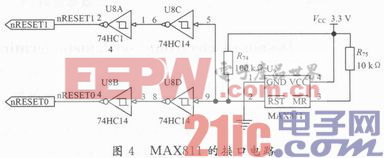
復位電路采用MAX811芯片。MAX811為4引腳微處理器電壓監視器,具有精密電源監控和低功耗的特點,能監視3 V,3.3 V和5 V的電源電壓,MAX811的工作電壓為1.0~5.5 V,MAX811為低電平有效復位。MAX811具有手動復位功能,電源電流6μA,復位閾值電壓有4.63 V,4.38 V,3.08 V,2.93 V和2.63 V五種,上電復位的脈沖寬度最小為140 ms。當微處理器的電壓VCC低于MAX811的門限電壓時,內部定時器復位到0,并保持復位輸出端為低電平。當VCC高于門限電壓時,內部定時器開始計數,計數到給定值(定時器的溢出期)時,輸出端變為高電平。圖4為MAX811的接口電路。本文引用地址:http://www.104case.com/article/148171.htm
2.3 CAN總線
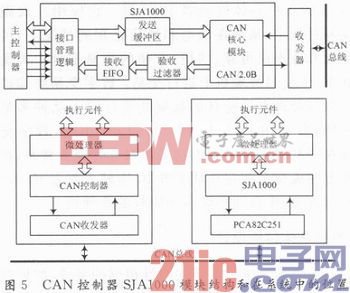
選用獨立的CAN協議控制器SJA1000。它是Philips半導體公司CA82CZOOCAN控制器(BasleCAN)的替代產品,而且還增加了一種新的操作模式——PeliCAN,這種模式支持具有很多新特性的CAN 2.0B協議。主要用于移動目標和一般工業環境中的區域網絡控制。從圖5可以初步了解CAN控制器的內部結構和在現場總線系統中的位置。
PCA82C251是CAN協議控制器和物理總線之間的接口,它主要在速度達1Mbaud的應用中使用。這個器件向總線提供了差動的發送能力,向CAN控制器提供了差動的接收能力。它完全符合ISO“11898—24 V”標準。一個限流電路可防止發送器的輸出級對電池電壓的正端和負端短路。雖然在出現這種故障條件時,功耗將增加,但這種特性可以防止破壞發送器的輸出級。圖6是PcA82C251內部結構圖,圖7是CAN協議控制器和物理總線之間的接口電路。
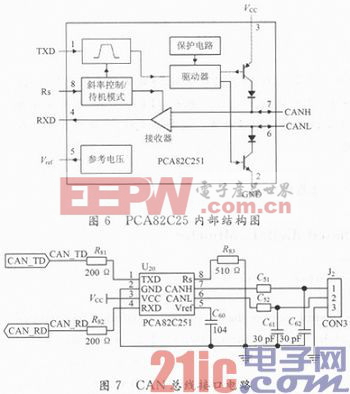
PCA82C251與CAN總線的接口部分也采取了一定的安全和抗干擾的措施。PCA82C251的CANH和CANL引腳各自通過一個電阻與CAN總線相連,電阻可以起到一定的限流作用,保護PCA82C251免受過流的沖擊。以CANH和CANL與地之間并聯了兩個30 pF的小電容,可以起到濾除總線上的高頻干擾和一定的防電磁輻射的能力。

pos機相關文章:pos機原理

評論