μC/OS和80C51的固話來電防火墻設計

3 μC/OS硬件層驅動程序設計
3.1 異步串行口驅動程序
當使用中斷模式時,從接收移位寄存器接收到一個完整的字節,并將數據送入數據輸入寄存器,產生一個中斷。中斷處理程序從端口讀入字節,清除中斷源。這時,可以處理ISR收到的字節,或者將字節送入緩沖區由后臺處理,緩沖區大小依賴于后臺進程控制CPU處理信息的速度。從串行端口捕捉數據時,常用一種被稱作環形緩沖區的專用緩沖區。
輸入數據的響應依賴于后臺進程的執行速度。如果是實時內核,則處理輸入數據的速度就與ISR接收不處理的速度差不多。為此,環形緩沖區的管理加入了信號量說明:
①應用程序等待信號量。
②接收到一字節后,ISR從串行端口讀入字節。
③將接收到的字節送入環形緩沖區。
④ISR釋放一個信號量,通知任務已經接收到一字節。
⑤信號量有效,等待任務準備開始運行。ISR完成后,內核決定等待任務是否成為優先級最高的任務。如果是,并且內核為可剝奪型內核,則恢復等待字節的任務。該任務從環型緩沖區取出數據,并執行相關操作。
3.2 基于μC/OS—II的串行口接收驅動
單片機對串口的支持僅僅是當數據送入SBUF時開始移位,但收到一個完整的字節后產生中斷,通知用戶進行讀操作。在P89C668中,串行口并沒有設計緩沖區,接收移位寄存器直接將數據送到接收SBUF,如果沒有及時從接收SBUF中取出,前一字節就會丟失。如果沒有驅動程序的支持,應用程序必須一字節一字節地接收數據,不但浪費時間,而且對應用程序的編制將產生極大影響。所以,在使用串口的時候,串口驅動程序是必須有的,通過驅動程序,可以大大簡化應用程序的編寫。
針對P89C668片內UART和μC/OS—II的特性,設計了分層明確的驅動模型,串口接收分層驅動結構圖略——編者注。
任務在對環形緩沖區進行操作的時候,通過等待信號量,確定緩沖區是否允許操作。同時,中斷服務子程序通過釋放信號量來通知任務可以對緩沖區進行操作,大大提高了任務的響應時間。
4 系統軟件設計
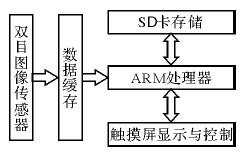
根據硬件構成,系統軟件可分為來電解碼、顯示、鍵盤、判決、存儲幾大模塊。模塊在μC/OS—II的調度之下運行。
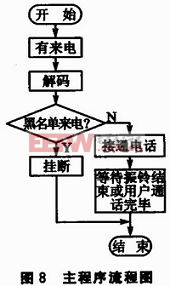
防火墻在值守狀態時,各模塊處于掛起態。當系統檢測到鈴流,將運行來電解碼模塊,并將解得的號碼通知μC/OS—II。μC/OS—II將通過判決模塊判斷來電屬性,執行相應動作。程序流程如圖8所示。本文引用地址:http://www.104case.com/article/148143.htm
結語
本文設計了基于μC/OS和80C51單片機的固話來電防火墻。介紹了電話機的基本工作原理,對硬件主要模塊進行了詳細地分解分析。對軟件基本流程和設計思路進行了闡述。整個系統通過了實際產品的最終驗證,達到設計要求。

交換機相關文章:交換機工作原理
評論