基于LabVIEW的倒車自動剎車系統(tǒng)開發(fā)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
4.3.2 成果分析
本文引用地址:http://www.104case.com/article/147867.htm報表輸出功能將速度軌跡及加速度軌跡以Excel的格式輸出,其結(jié)果如圖16、17所示。
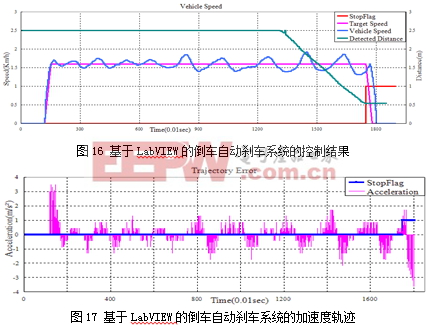
圖16所示的測試結(jié)果顯示實際車速軌跡與預(yù)定車速軌跡的穩(wěn)態(tài)誤差在-0.2Km/h到0.3Km/h之間,且車輛完全制動時車—障礙物實時距離為54cm。圖17顯示整個控制過程中的實時加速度軌跡,在勻速狀態(tài)時的加速度均低于1.4m/s²,遠(yuǎn)小于人體舒適的加速度極限(≤2.5m/s²)。由此可知,實際控制效果已基本達(dá)到預(yù)期目標(biāo)。
4.3 現(xiàn)場成果
本系統(tǒng)安裝于長安志翔CV8上,車載CAN網(wǎng)絡(luò)通過NI 8473與筆記本電腦上的LabVIEW平臺實時通信。同時將超聲波傳感器安裝于車后牌照正上方,并通過NI DAQ平臺配置NI9269及NI9221的相關(guān)參數(shù),從而驅(qū)動超聲波傳感器。圖18為超聲波傳感器與相關(guān)數(shù)據(jù)采集設(shè)備的連接圖,圖19為現(xiàn)場時設(shè)備連接圖。

五. 結(jié)論
從技術(shù)層面講,NI DAQ平臺和LabVIEW開發(fā)環(huán)境無縫連接使用戶輕松的通過圖形化開發(fā)環(huán)境訪問底層硬件,快速建立系統(tǒng)原型和數(shù)據(jù)采集應(yīng)用,大大降低了系統(tǒng)開發(fā)的技術(shù)風(fēng)險。LabVIEW強大的數(shù)據(jù)采集和信號處理功能極大地節(jié)省了采集終端軟件的開發(fā)時間,在NI DAQ平臺和LabVIEW CAN模塊的配合下使得采集終端能夠?qū)崟r并且高質(zhì)量地完成數(shù)據(jù)采集、信號處理、數(shù)據(jù)傳送和數(shù)據(jù)處理的工作,為整個系統(tǒng)的開發(fā)研究提供靈活、強大的底層硬件支持。
基于LabVIEW平臺的倒車自動剎車系統(tǒng)已在長安志翔CV8上成功實現(xiàn)相關(guān)功能,該系統(tǒng)的成功開發(fā)在速度控制領(lǐng)域及相關(guān)輔助系統(tǒng)開發(fā)方面取得突破性進(jìn)展。同時對長安汽車有限公司正在進(jìn)行的全自動泊車系統(tǒng)的開發(fā)奠定夯實的技術(shù)基礎(chǔ)。
加速度計相關(guān)文章:加速度計原理













評論