基于LabVIEW的倒車自動剎車系統開發

傳感器的引腳定義如表1所示:
本文引用地址:http://www.104case.com/article/147867.htm
通過Time-of-Flight(TOF)算法計算發射波與接收波的時間差,從而得出超聲波探頭與障礙物間的距離,其距離計算公式如(1)式所示:
D=(c*t)/2 (1)
式中D為超聲波傳感器與障礙物的距離,c為聲波在空氣中的速度,t為發射波與接受波的時間差。
3.2.2 方案設計及指標設定
由圖3可知超聲波傳感器的激勵波脈沖時序在發射周期初始階段連續發射14個40kHz的脈沖串后持續低電平至周期結束,屬于非常規信號源,對外圍硬件電路設計造成極大困難。針對此問題,LabVIEW DAQ平臺的相關設備則降低了采集系統構筑的難度。
▲ 采用的NI cDAQ-9178為8槽USB機箱,具有50多個結合集成信號調理的可熱插拔I/O模塊,機箱中內置4個通用32位計數器/定時器,并可借助使用DAQ Assistant的NI-DAQmx軟件自動代碼生成
▲ NI 9269采用單通道輸出14個12V、40kHz的模擬電壓信號后持續低電平,信號周期30ms
▲ NI 9221采用單通道模擬輸入模塊,采樣頻率1kHz,采樣點數1k
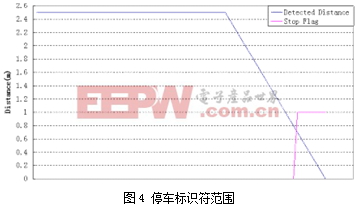
本系統屬低速控制范圍(即車速低于5Km/h),為保證駕駛員的安全性同時避免車輛碰撞障礙物,依據運動學公式V02=2aS設定預定警戒距離為70cm。并在開發程序過程中設定70cm為停車標識符(StopFlag),如圖4。
3.3 剎車控制模塊
3.3.1 車輛模型
車輛數學模型的建立有利于驗證系統的可行性,北科大的陳柏全教授在Matlab/Simulink平臺上構建如圖5所示的車輛縱向模型。
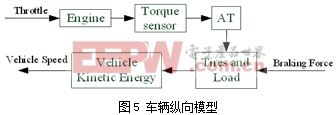
為了減小車身零部件對系統的非線性因素導致的累積誤差影響,本系統僅通過試驗車的電動真空助力泵(EVB)所提供的助力實現制動力輸出。
根據牛頓第二定律可建立車輛縱向模型的一階線性微分方程,如(2)式所示:
式中Mv 為車身質量,v為實時車速,Fb 為制動力,Fa為空氣阻力,g為重力加速度,θ為路面坡度,Fθ為怠速驅動力。
3.3.2 速度曲線規劃
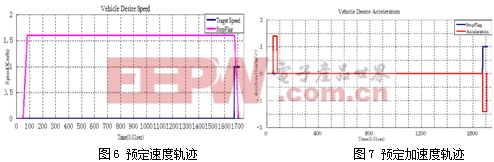
規劃的曲線必須盡可能的平順并且沒有緊急制動情況的出現,在速度控制領域內有多種方法可實現。但對于如何使駕駛員在加減速時感覺較舒適,則是目前速度控制領域內比較重要的課題。Kyongsu Yi的論文中指出,駕駛員感到較為舒適的加減速不應高于2.5m/s²。根據此研究成果,本系統的預定速度設定為1.6Km/h如圖6,預定加速度設為1.4m/s²如圖7,理論上的車輛制動距離為7cm。根據圖6的預定速度軌跡可將其分成加速、勻速以及減速三個狀態,首先控制車速以定加速度從0Km/h升至1.6Km/h;若系統監測到StopFlag為0(即車—障礙物在停車范圍以外),系統維持車速處于勻速狀態即以1.6Km/h定速行駛;若系統監測到StopFlag為1(即車—障礙物在停車范圍以內),則進入減速狀態,速度以定加速度從1.6Km/h降至0Km/h。
加速度計相關文章:加速度計原理













評論