基于LabVIEW的倒車自動剎車系統開發

3.3.3 速度控制器設計
本文引用地址:http://www.104case.com/article/147867.htm速度控制器采用離散型的增量PI算法。經整理后如(3)式所示。
式中KP=K*T/Ti,KI=K,K為增益系數,Ti為積分時間,T為足夠小的常量本系統選取系統程序運行周期時間即50ms。
由于車輛影響系統動能因素較多,故在增量式PI算法的基礎上結合Fuzzy算法。(3)式經Z變換整理后如(4)式所示:
根據(4)式構建的Fuzzy—PI控制器如圖8所示:
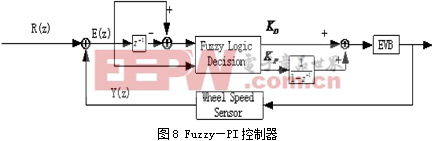
在Fuzzy算法中,本系統利用實時車速與預定車速軌跡的誤差量定義相關特征變量的歸屬函數,即實時速度歸屬函數(圖9)、速度誤差量歸屬函數(圖10)及速度積分誤差量歸屬函數(圖11)。上述三個歸屬函數均采用三角形分布的歸屬函數,由于試驗車是自動檔車型,怠速下的速度最大值在5Km/h左右,而本系統是將車速控制在3Km/h以下,故速度歸屬函數介于0-3Km/h。一般而言,考慮微控制器的運算速度情況下,所設計的語意法則不超過9個,結合本系統輪速傳感器的有效精度是0.01Km/h,故在上述三個歸屬函數均采用了5個模糊語言變量。
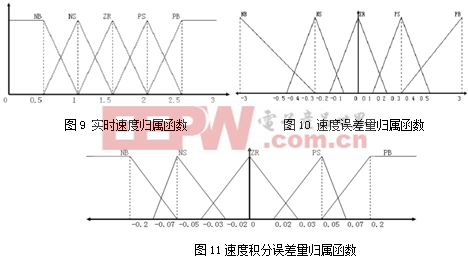
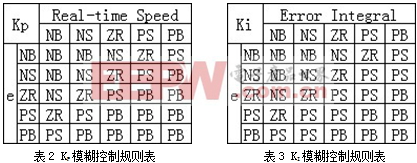
相關歸屬函數的定義原則是當速度誤差較大時調整為較大參數,使得速度可以快速的收斂到預定軌跡,反之若誤差量較小時調整為較小參數,使得速度可以穩定在預定軌跡附近。速度積分誤差量的歸屬函數定義則是為了解決系統的穩態誤差,即減小實時車速與預定軌跡車速間的誤差。KP及KI的模糊控制表如表2、3所示。
經多次測試后得到的特征變量參數如(5)及(6)式所示。最后在解模糊化時,本系統采用最大隸屬度去最大值法。
KP={18/NB,10/NS,5/ZR,10/PS,20/PB} (5)
KI={20/NB,10/NS,8/ZR,10/PS,15/PB} (6)
四. 軟件實現與現場結果
4.1 系統結構
基于LabVIEW的倒車自動剎車系統主要分為兩個部分:
4.1.1 數據采集(下位機部分)
依據前文所述的系統模塊可將數據采集分為兩個部分。在測距模塊中,驅動NI 9264模擬輸出產生周期為30ms的40kHz超聲波激勵信號,通過NI9205接收反射波信號,并利用Labview的脈沖探測函數計算超聲波的傳播時間,從而計算出車—障礙物的實時距離。在剎車控制模塊中,利用NI 8473與車載CAN網絡無縫連接,實現DPC與車載設備的數據交互。
加速度計相關文章:加速度計原理













評論