基于串級PID控制算法的壓控大功率電流源

技術路線及部分電路原理
本文引用地址:http://www.104case.com/article/147853.htm技術路線
根據電流源的控制模型,設計本系統的技術路線,如圖3所示,由控制單元控制輸出四路信號,用戶輸入波形參數可調節波形頻率,其中兩路分別是脈沖波與方波信號,經過整形電路去除高頻雜波,根據用戶輸入的波形參數由控制單元控制自動增益電路,調節波形的幅值,得到穩定精確的脈沖波形及方波波形信號。由控制單元產生的一路方波信號經過D/A轉換電路得到正弦波波形信號,經過有源低通濾波(LPF)電路濾除因D/A轉換后產生的高次諧波,然后控制自動增益電路,調節波形的幅值,得到穩定精確的正弦波及任意波波形信號。由控制單元輸出的四路信號經過調理放大后輸入至大電流發生電路,大電流發生電路由大功率驅動管、反饋電路組成,將四路信號提升為大電流并由輸出接口輸出,大電流發生電路采用模擬PID控制技術,并且采用串級PID控制算法,自動調節電流輸出值,提高精確度與穩定度。本電流源擬設計USB/RS232等串口通信模塊,方便用戶將輸出的電流數據及波形輸入上位機;用戶也可使用外部存儲設備(如U盤等)通過USB/RS232接口將波形數據輸入至控制單元,然后經過信號調理放大電路、大功率電流發生電路,就可獲得任意波形的電流。本電流源中設計自檢自校準模塊,讓用戶在使用之前了解系統是否正常,同時,對系統進行自動校準,提高電流的輸出精確度。本系統采用顯示模塊將輸出的電流波形及數據顯示出來,建立友好的人機交互界面。
基于內環PID控制的電路原理
將內環PID控制器的基本原理應用到本電流源設計中,得出基于模擬PID控制的單大功率MOS管恒流源電路如圖4所示。
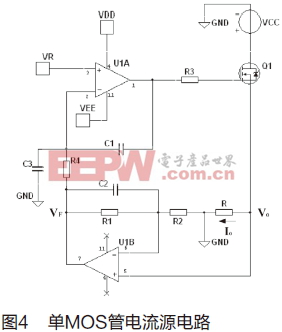
其中圖4中:
VR為控制電壓;
Vo為反饋電壓;
VCC為供電電壓;
Io為輸出的恒定電流;
U1A、U1B為高速運算放大器;
R為采樣電阻。
具體的電路分析如下:
基準電壓VR連接到運放U1A的同相端,運放U1B控制跨導放大器的導通程度,并由此獲得相應的輸出電流,輸出電流在采樣電阻R上產生采樣電壓,該采樣電壓經過U1B放大器后作為反饋電壓反饋回電壓放大器U1A的反相輸入端,并與同相輸入端的電壓相比較,對輸出電壓進行調整,進而對跨導放大器的輸出電流進行調整,使整個閉環反饋系統處于動態的平衡中,以達到穩定輸出電流的目的。利用虛短、虛斷的定義及相關公式,可推到出VR與Io的關系:
自檢自校準模塊電路原理
自檢的主要任務是檢測系統中一些關鍵設備是否存在錯誤和能否正常工作。系統參數初始化完畢后進入自檢流程,控制單元給網絡通信模塊發送數據,通過檢測反饋數據與發送數據是否一致來判斷通信模塊是否正常。采集各路傳感器的電信號,判斷傳感器是否存在及能否正常工作等。若發現故障,顯示屏上給出相應故障提示信息。
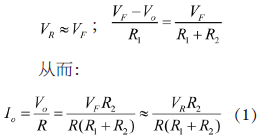
本電流源采用自校準技術提高測量精確度及可靠性。自校準技術包括外部校準和內部校準兩部分。在本電流源中,外部校準主要是指應用零點漂移自動校準。零點漂移是造成零位誤差的主要原因之一,即當輸入信號為零時,輸出信號不為零,且零點漂移值會隨著溫度的變化而變化。本電流源采用低溫漂、穩定性好的測試傳感器及調理電路模塊器件,極大減少溫度變化對本裝置測試帶來的影響。假設零點漂移電壓為Vos,校準零點漂移電壓為Vos,校準電路原理如圖5。

DIY機械鍵盤相關社區:機械鍵盤DIY
pid控制相關文章:pid控制原理
電路相關文章:電路分析基礎
pid控制器相關文章:pid控制器原理
激光二極管相關文章:激光二極管原理




評論