基于S12ZVM的車用BLDC無傳感控制方案

由于無法確切知道BLDC無傳感電機的初始位置,其啟動過程要比帶Hall傳感器BLDC電機的啟動過程復雜。如圖4所示,其啟動過程包括Alignment階段,Open Loop Starting階段及最終的Run階段。在Alignment階段,控制器同時施加相同占空比的PWM給A相與B相,C相則與地相連,這樣就將BLDC電機穩定在一個已知的位置。占空比的大小與持續的時間取決于BLDC電機特性和負載大小,通常持續時間在100ms到500ms之間。當Alignment過程結束后,就進入Open Loop Starting階段,由于反電動勢與轉子轉速成正比,在極慢的轉速下反電動勢的幅值很低,很難檢測到過零點。因此,當電機從靜止狀態啟動時必須采用開環控制,待有足以檢測到過零點的反電動勢時,才轉而采用反電動勢檢測控制并進入Run階段。當進入到Run階段后,BLDC就采用速度閉環控制,過零點由反向電動勢檢測所得。
本文引用地址:http://www.104case.com/article/146842.htm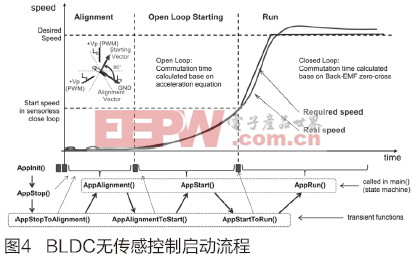 ?
?無傳感位置檢測實現
依靠Hall傳感器的運行實現起來非常容易,但除去Hall傳感器可降低系統成本并提高可靠性。BLDC電機轉動時,每個繞組都會產生叫做反電動勢的電壓,根據楞次定律,其方向與提供給繞組的主電壓相反。反電動勢主要取決于三個因素:轉子角速度,轉子磁體產生的磁場,定子繞組的匝數。
當采用傳感器時,MCU會根據Hall信號來決定BLDC換向點。當采用無傳感控制時,則可以采用反電動勢過零點檢測來決定正確的換向點,如圖5所示。
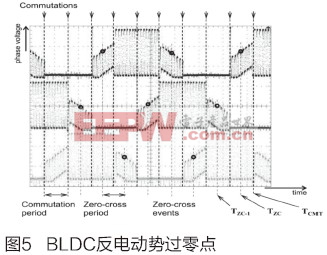 ?
? 當在一個恒速情況下,切換周期等于過零點周期,圖中圈圈代表著過零點發生的地方,一般處在兩個切換點的中間。所以通過timer得出上一次過零點時間以及本次的過零點時間,就可以計算出正確的換向點。
??????? ![]()
其中:![]() –實際過零點時間,
–實際過零點時間,![]() –上次過零點時間,
–上次過零點時間,![]() –下次換向點時間,
–下次換向點時間,![]() –范圍在0.3~0.5的常數(取決于電機參數)。
–范圍在0.3~0.5的常數(取決于電機參數)。
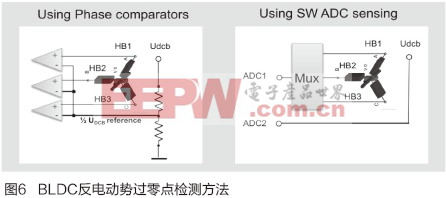
所以,成功檢測反電動勢過零點就決定了無傳感控制BLDC成功的關鍵。如圖6所示,通常有硬件和軟件兩種方式能檢測到反電動勢過零點。第一種是采用三個硬件比較器,在某切換周期中不加電的一相可以通過相應的硬件比較器與1/2的Udcb電壓進行比較,在PWM周期中ON有效時,比較器能夠檢測到反向電動勢電壓變化從而得出過零點的位置。第二種方式可以用軟件AD采樣來實現,在BLDC電機運行過程中,使用ADC對不加電的一相進行采樣,與此同時Udcb會被另一路ADC模塊同時采樣,然后軟件可以實時地根據兩個采樣數值進行過零點判斷。
 ?
?







評論