基于MATLAB的控制系統(tǒng)實時仿真平臺設計

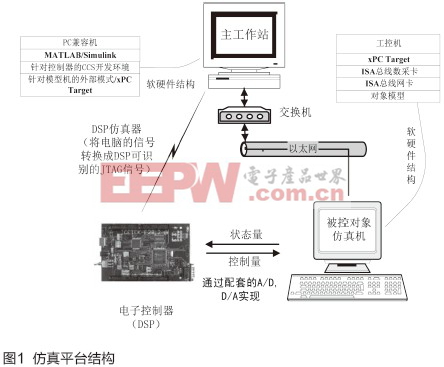
摘要:針對現(xiàn)有控制系統(tǒng)設計方法開發(fā)周期長、費用高的問題,本文利用基于模型的軟件開發(fā)方式,以DSP和工業(yè)控制計算機為硬件,構建了能夠實現(xiàn)Simulink模塊自動代碼生成的、能完成針對任何復雜對象控制仿真的控制系統(tǒng)硬件在回路仿真平臺,解決了S函數(shù)封裝、控制應用程序模塊連接等關鍵問題,同時以直流電機速度控制為例,在完成Simulink全數(shù)字仿真的基礎上,利用該仿真平臺進行了半物理仿真,仿真結果證實了該平臺的有效性。
本文引用地址:http://www.104case.com/article/146822.htm控制系統(tǒng)開發(fā)的一般流程是設計人員進行對象建模、控制算法設計、離線全數(shù)字仿真,之后將驗證過的控制算法于真實控制器中手動編程實現(xiàn)并進行硬件在回路的半物理仿真,這就涉及到代碼編寫、軟件校驗測試等工作,整個開發(fā)過程設計繁雜、周期長且調(diào)試困難[1-2]。
 ?
?隨著越來越多成熟的軟件工具的出現(xiàn),以自動代碼生成技術為代表的基于模型的軟件開發(fā)方法逐漸興起,讓算法到嵌入式實時C代碼的生成一次成功,避免傳統(tǒng)開發(fā)要重復多次才能成功的弊端。而MATLAB/RTW工具更是以其可靠性高、組建靈活等特點在眾多能實現(xiàn)自動代碼生成的軟件中優(yōu)勢明顯。
 ?
?本文正是利用MATLAB/RTW構建了適用于任何復雜被控對象的硬件在回路仿真系統(tǒng),該系統(tǒng)能夠實現(xiàn)DSP/工控機環(huán)境下Simulink模型自動編譯與下載、仿真參數(shù)在線修改、仿真數(shù)據(jù)實時存儲等功能,以直流電機速度控制位對象的仿真結果也證實了該平臺的有效性。
RTW與自動代碼生成
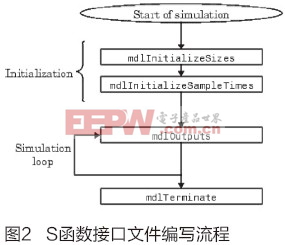
RTW(Real-time Workshop)是MATLAB的重要組成部分[3][4],或者說是一個基于MATLAB/Simulink的自動代碼生成環(huán)境,它能直接從Simulink仿真模型中產(chǎn)生優(yōu)化的、可移植的和個性化的代碼,并根據(jù)目標系統(tǒng)配置自動生成多種環(huán)境下的可執(zhí)行程序,支持的硬件包括如DSP、x86、PowerPC等系列CPU構建的計算機,軟件平臺如DOS、Windows、VxWorks、xPC、Linux等操作系統(tǒng),甚至可以獨立運行于裸機上。利用RTW和自動代碼生成技術能夠避免軟件開發(fā)人員手工編制、調(diào)試程序這一復雜、反復的過程,從而縮短研發(fā)周期,提高產(chǎn)品質量。RTW的工作流程可分為四步:

pid控制相關文章:pid控制原理
c++相關文章:c++教程
pid控制器相關文章:pid控制器原理
汽車防盜機相關文章:汽車防盜機原理









評論