RSSI 室內節點定位系統設計

匯聚節點設計
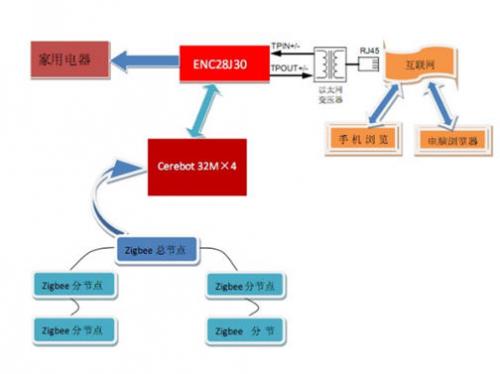
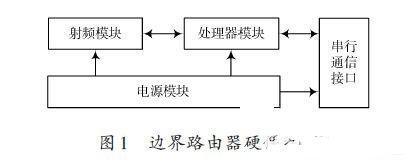
本文引用地址:http://www.104case.com/article/145478.htm匯聚節點包括控制器模塊、射頻模塊、通信模塊、電源模塊等部分組成,其主要功能是通過射頻模塊收集信標節點的測量信息,計算目標節點與各個信標節點的距離,并通過串口將各個信標節點編號和距離傳給位置計算裝置。在較大規模的網絡部署中,也可通過ZigBee網絡將距離數據傳給遠端的位置計算裝置。匯聚節點控制器同樣采用CC2430芯片,匯聚節點的系統組如圖5所示。
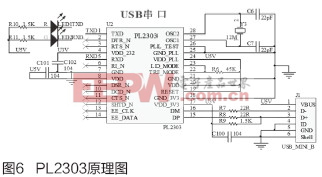
串口通信模塊采用了控制器的USART片內外設,可輸出TTL的串口通信數據。由于位置計算裝置多采用PC機,最新生產的PC機一般都取消了RS232通信接口,采用更為方便的USB接口,故在匯聚節點中采用了Philips公司的PL2303數據轉換芯片[7],可將TTL的串口數據轉換成USB通信數據,方便與電腦連接。PL2303的轉換電路如圖6所示。
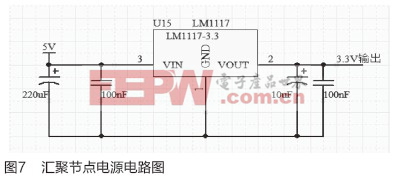
一般PC機的USB接口可提供5V的直流電源,最大電流可達500mA,足以滿足匯聚節點的電源需求。匯聚節點通過USB接口從位置計算裝置獲得5V電源,輸入的5V電源首先通過電容濾波,再通過穩壓芯片輸出給處理器穩定的3.3V工作電壓,在該節點中,選用專為通信控制芯片提供轉換電壓的LM1117為轉換芯片,它具有功耗低,體積小等優點。又因為電壓中含有許多高頻干擾源,這些高頻成分很容易經過電源進入通信系統中。另外系統自身的發送頻率也會經過電源感應反饋到通信系統造成干擾。因而可在電源電路中加入220μH的電感,與并入多個不同容值的電容所構成的濾波電路來抑制各種高頻信號。使節點能夠得到穩定可靠且低干擾的電源,保證其可靠運行。具體電源電路如圖7所示。
系統軟件設計
定位系統需要目標節點、信標節點、匯聚節點、位置計算裝置協調工作完成定位功能,其中的目標節點具有兩種工作模式,連續模式和命令模式。在命令模式下,當目標節點接收到機器人發出的定位命令后,進行RSSI測距;在連續模式下,目標節點連續發送射頻信號進行RSSI測距。兩者主要工作步驟相似,下面僅對目標節點基于命令模式定位方法的工作步驟進行描述。其中測距公式采用式(1)計算。
![]()
式中,![]() 為接收到信號強度,模型參數A、n是根據實際環境測的數據得到的。
為接收到信號強度,模型參數A、n是根據實際環境測的數據得到的。
![]()
通過公式(2)計算出目標節點與各個信標節點的距離d(m),其中的μ為修正系數可通過信標節點的位置可知。
具體工作步驟如下:
(1)信標節點啟動,首先初始化,然后立即進入實時監測射頻同步信號狀態。
(2)目標節點通過串口通信模塊接收到移動機器人的定位請求后,立即發送射頻信號,其中的射頻信號攜帶目標節點的ID信息。



評論