為你的輸入找到最合適的匹配

Dave:因此,反饋回路實際上“糾正”了由10k(并聯的R1和R2……固定電阻)、反饋C1(固定電容)和輸入C(可變電容)組成的不同的時間常數,見圖2。但是正輸入端不會受到影響。如果反饋網絡出現相位滯后(phase lag),放大器將由輸出端出現的相位超前(phase lead)來響應。
本文引用地址:http://www.104case.com/article/124446.htmT博士:這是由于反饋方程改變了反饋網絡的結果。
Dave:是的,我將給我們有興趣的讀者留下一些思考。但是,反饋中一個低通會在輸出端產生高通,反饋中的高通會在輸出端產生低通。有趣的是,反饋中的延遲要比輸出中的提前……因此,我可以預測,明天的市場上將會有足夠多的延遲線和運算放大器!
T博士:我覺得你這里的邏輯有一些問題……
Dave:當然。如果你把這個概念推到極端,全部事情都會變得不穩定……所以,我不會很快致富。但是,在小范圍內,效果十分有效。反饋中的一個小相位延遲會使輸出出現一個小相位超前。
T博士:但是,你真正想要的是在兩個輸入端有相同的效果。
Dave:我需要在輸入端增加電阻,這樣其RC乘積就可以匹配反饋RC乘積。
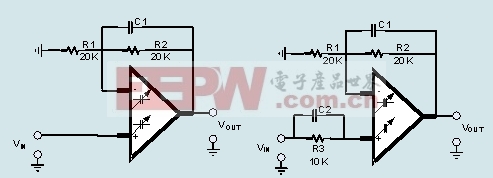
圖2:不同輸入C的補償
T博士:這聽起來幾乎就像雙極運算放大器中的平衡DC電流。你需要使兩個輸入端的等效電阻相同,以盡量減少偏移。
Dave:就是這樣!如果平衡了正輸入端和負輸入端的RC延遲,那么,當C隨著信號變化時,兩個RC將變化,并有效地相互抵消。所以,我在信號到正輸入端之間串聯了一個R(像在反饋R中那樣用一個C跨接)。現在我在兩個輸入端得到了同樣的結果,就如同在DC的情況下,它們都會抵消。我的失真幾乎消失了!問題解決了。
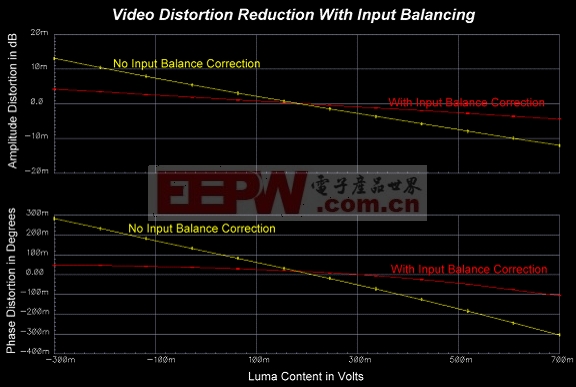
圖3:利用平衡輸入阻抗減少視頻失真(圖字:以度表示的相位失真;以dB表示的振幅失真)



評論