數字電源控制模擬控制能力

本文引用地址:http://www.104case.com/article/124365.htm
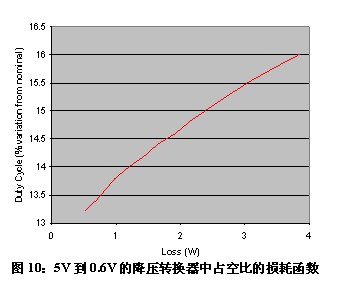
(圖字:占空比(標稱值變化百分比),損耗(W))
因此,由于占空比可以作為測量相對損耗的方法使用,可以在數字實現過程中改變參數,并對占空比的影響情況進行監測。如果占空比增加,則可以在相反的方向調整參數,可以減少占空比(和相對損耗)。
死區時間是高側FET關斷和低側FET導通之間的時間,反之亦然。如果死區時間過長,體二極管導通代表可能會出現損耗。如果死區時間太短,那么就可能發生交叉導通,也引入了損耗,如圖11所示。
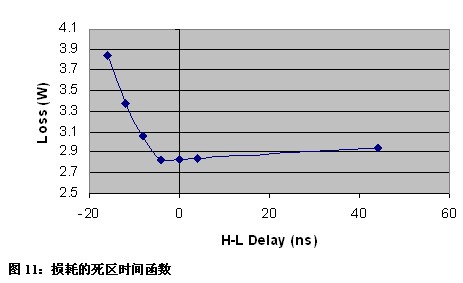
(圖字:損耗(W),H-L延遲(ns))
在大多數設計中,最佳死區時間不是固定值。圖12顯示了幾種情況下低側柵極信號和開關節點的波形。上圖為60納秒時的固定死區時間。左上圖是電流為1安培的情況,右上圖是20安培負載電流的情況。請注意,也就是說,波形之間的相對差額在中電壓范圍。還要注意,在20安培情況下,開關節點電壓中有一些下沖,這表明死區時間過長(導致體二極管導通)。
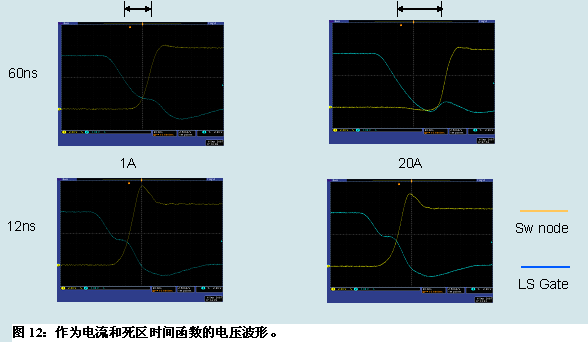
(圖字:Sw節點,LS門)
下圖有12納秒的固定死區時間。請注意,在這種情況下,在電流函數痕跡之間差別不大。因此,理想的死區時間可能無法由一定的電壓波形來確定。理想的死區時間很可能是負載電流的一個函數。請注意,開關節點電壓過沖說明有交叉導通,即這種情況說明死區時間太短。
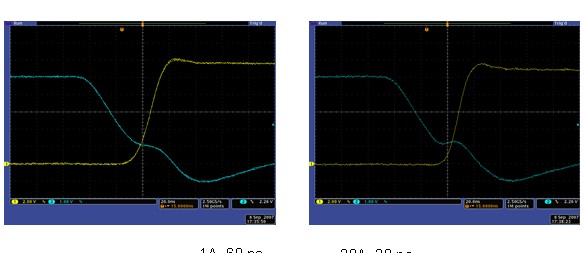
圖13顯示了分別使用60納秒和28納秒最佳死區時間設置的1安培和20安培的波形。請注意,開關節點的下沖或過沖較少。
因為我們知道,相對損耗可以通過占空比測得,數字控制可以改變死區時間,同時觀察占空比,從而優化了轉換器的效率。該算法可優化隨負載變化,以及溫度變化,及器件老化的效率,得到最佳效率。

pid控制相關文章:pid控制原理
模擬信號相關文章:什么是模擬信號
pwm相關文章:pwm是什么
比較器相關文章:比較器工作原理
pid控制器相關文章:pid控制器原理
塵埃粒子計數器相關文章:塵埃粒子計數器原理 數字濾波器相關文章:數字濾波器原理

評論