第四屆智能車競賽技術(shù)報告
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
1 光電傳感器的原理
本文引用地址:http://www.104case.com/article/112025.htm光電傳感器檢測路面信息的原理是由發(fā)射管發(fā)射一定波長的紅外線,經(jīng)地面反射到接收管。由于在黑色和白色上反射系數(shù)不同,在黑色上大部分光線被吸收,而白色上可以反射回大部分光線,所以接收到的反射光強是不一樣,進而導(dǎo)致接收管的特性曲線發(fā)生變化程度不同,而從外部觀測可以近似認為接收管兩端輸出電阻不同,進而經(jīng)分壓后的電壓就不一樣,就可以將黑白路面區(qū)分開來。
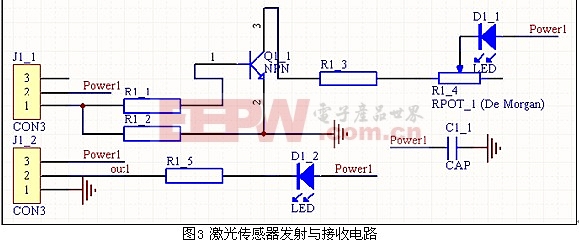
2 激光傳感器的設(shè)計
激光傳感器與普通的光電傳感器原理都是一樣,但是其前瞻能力遠大于普通的光電傳感器,可以達到40~50 cm,對于智能車來說已經(jīng)足夠。在競賽中,規(guī)則規(guī)定傳感器最多不能超過16 個,我們選用了15個激光傳感器,所有的傳感器呈“一”字排布。激光傳感器由兩部份構(gòu)成,一部份為發(fā)射部份,一部分為接收部份。發(fā)射部份由一個振蕩管發(fā)出180kHz 頻率的振蕩波后,經(jīng)三極管放大,激光管發(fā)光;接收部份由一個相匹配180KHz 的接收管接收返回的光強,經(jīng)過電容濾波后直接接入S12 單片機的PA 與PM口,檢測返回電壓的高低。由于激光傳感器使用了調(diào)制處理,接收管只能接受相同頻率的反射光,因而可以有效防止可見光對反射激光的影響。
為了簡化15 路激光傳感器的控制,減少激光傳感器相互之間的干擾,傳感器的控制采用了分時發(fā)光的策略,使用74LS154 作為分時控制器,由S12 的3 個IO 口來控制7 組傳感器的開斷,同一時間控制每組相隔最遠的兩路傳感器發(fā)光,這樣接收管就接收不到相鄰傳感器發(fā)射的激光了,因而達到了防止相互傳感器之間干擾的目的。
參考文獻:
[1] 邵貝貝. 嵌入式實時操作系統(tǒng)[LC/OS-Ⅱ(第2 版)[M]. 北京.清華大學(xué)出版社.2004
[2] 邵貝貝. 單片機嵌入式應(yīng)用的在線開發(fā)方法[M].北京.清華大學(xué)出版社.2004
[3] 王曉明. 電動機的單片機控制[M].北京. 北京航空航天大學(xué)出版社.2002
[4] 臧杰,閻巖. 汽車構(gòu)造[M]. 北京. 機械工業(yè)出版社.2005
[5] 安鵬,馬偉.S12 單片機模塊應(yīng)用及程序調(diào)試[J]. 電子產(chǎn)品世界. 2006.第211期. 162-163

伺服電機相關(guān)文章:伺服電機工作原理











評論