第四屆智能車競賽技術報告

系統總體方案的設計
本文引用地址:http://www.104case.com/article/112025.htm競賽規則規定,智能車系統采用飛思卡爾的16 位微控制器MC9S12XS128 單片機作為核心控制單元用于智能車系統的控制。在選定智能車系統采用光電傳感器方案后,賽車的位置信號由車體前方的光電傳感器采集,經XS12 MCU 的I/O 口處理后,用于賽車的運動控制決策,同時內部Pulse-Width 模塊發出PWM 波,驅動直流電機對智能車進行加速和減速控制,以及多個伺服電機對賽車各個部位的轉向進行控制,使賽車在賽道上能夠自主行駛,并以最短的時間最快的速度跑完全程。為了對賽車的速度進行精確的控制,在智能車后軸上安裝光電編碼器,采集車輪轉速的脈沖信號,經MCU 捕獲后進行模糊PID 自動控制,完成智能車速度的閉環控制。此外,還增加了鍵盤作為輸入輸出設備,用于智能車的角度和方位控制。系統總體方框圖如圖1。
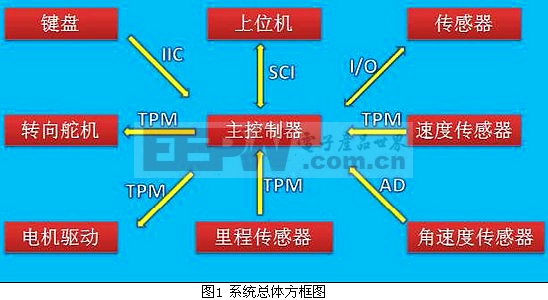
根據以上系統方案設計,賽車共包括七大模塊:MC9S12XS128 主控模塊、傳感器模塊、電源模塊、電機驅動模塊、速度檢測模塊、輔助調試模塊。各模塊的作用如下。
MC9S12XS128 主控模塊,作為整個智能車的“大腦”,將采集光電傳感器、光電編碼器等傳感器的信號,根據控制算法做出控制決策,驅動直流電機和伺服電機完成對智能車的控制。
傳感器模塊,是智能車的“眼睛”,可以通過一定的前瞻性,提前感知前方的賽道信息,為智能車的“大腦”做出決策提供必要的依據和充足的反應時間。
電源模塊,為整個系統提供合適而又穩定的電源。
電機驅動模塊,驅動直流電機和伺服電機完成智能車的加減速控制和轉向控制。
速度檢測模塊,檢測反饋智能車后輪的轉速,用于速度的閉環控制。
輔助調試模塊主要用于智能車系統的功能調試、賽車狀態監控等方面。
智能車傳感器模塊設計
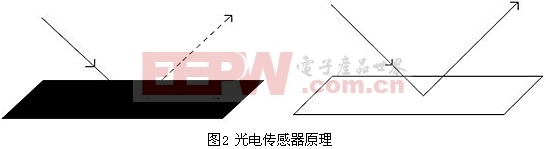
在確定智能車總體方案時,我們選擇光電傳感器的方案。為了獲得更大前瞻距離,為控制系統后續處理贏得更多的時間,在從眾多光電傳感器中選擇了大前瞻的激光傳感器,前瞻距離可以達到普通光電傳感器的數倍甚至十幾倍,完全滿足競賽的要求。

伺服電機相關文章:伺服電機工作原理











評論