基于LabVIEW和PXI平臺的6-DOF并聯機器人控制系統的開發

控制系統軟件設計
本文引用地址:http://www.104case.com/article/108857.htm控制系統的復雜性使得軟件設計的過程中必須進行合理有效的層面和模塊劃分。結合控制系統硬件和所要呈現的功能,本軟件劃分為應用軟件層、核心軟件層和驅動軟件層,每層根據功能要求又分為若干功能模塊。如圖2.
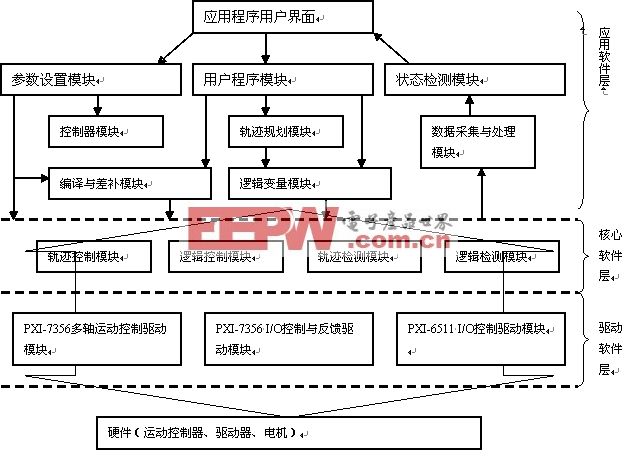
圖2. 軟件結構與信息傳遞
應用軟件層:考慮到系統操作過程中需要運用一些開關來控制電機或抱閘、一些接口來改變各電機或壓電陶瓷的運行參數、一些指示燈來發出正常或報警信號、一些軌跡曲線來實時監控各部分的運行情況以及各界面之間的切換等功能,我們選用了最能體現虛擬儀器技術價值的LabVIEW圖形化編程語言,編寫了友好、方便、靈活的人機界面。程序的整體采用了主/從結構的編程方式,主要是為了解決多個不同頻率的循環和循環之間的信息交互。程序中嵌入了并聯機器人的反解模型及控制算法,采用全局變量、局部變量、共享變量等實現各程序模塊之間及模塊內部的信息交互,充分利用用戶事件技術、通知或隊列技術實現各界面之間的切換,為了避免諸如兩個循環同時操作一個對象之類的競爭問題,采用了同步技術。因為程序比較大,所要反映的信息多,因此在程序的管理上,我們也充分利用了LabVIEW的高級編程技巧,如為了節省內存和清晰化程序框架及前面板,我們采用了動態VI控制技術,不但實現了子VI的即用即調,而且實現了多面板程序設計的動態載入和界面重用。
核心軟件層:面向機器人的軌跡控制與I/O邏輯控制的程序集合,如回零點、連續運行、單軸調整、軌跡曲線選擇、系統自檢等。該層軟件一方面負責完成機器人各關節驅動電機的精確同步運動控制,實現末端執行器在操作空間中的精確軌跡;另一方面,該層軟件還需要完成一組通用I/O的輸入輸出控制,實現對機構運動的過程控制以及對外圍設備的協調控制等,以適應復雜的控制任務需要。
驅動軟件層:驅動軟件是實現單軸與多軸運動控制、D/A轉換和硬件I/O控制的函數集合,包括軸配置、運動類型設置、電機運行和停止等操作函數。該層軟件主要進行運動軸參數設置、電機加減速控制、起停控制、D/A轉換和運動I/O的設置與控制等。該層的函數主要是控制板卡所帶有的底層功能模塊,可以用這些函數很方便的根據自己設定的控制方案編程實現上一級的核心控制軟件層。LabVIEW 圖形化語言和LabVIEW RT、Control Design and Simulation Bundle、Labview System identification toolkit, motion assistant等相關的NI工具包開發應用程序不但使得軟件程序的開發效率大大提高,而且使得軟件的功能齊全、人機界面友好。











評論