基于LabVIEW和PXI平臺的6-DOF并聯(lián)機器人控制系統(tǒng)的開發(fā)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
研究背景:
本文引用地址:http://www.104case.com/article/108857.htm并聯(lián)機器人以其卓越的性能正在走出實驗室,步入工業(yè)界和人們最為熟悉的日常生活中。早在1962年Gough and Whitehall就把并聯(lián)機器人作為輪胎檢測機。最近幾十年中,并聯(lián)機器人被用于飛行器模擬器、微操作機器人、手術(shù)機器人以及大型射電望遠鏡中的例子舉不勝舉。然而,此類并聯(lián)機器人大多存在開發(fā)周期長、系統(tǒng)不開放維護和升級困難、造價高昂以及系統(tǒng)特性不完善等缺點,這也是制約并聯(lián)機器人全面走向市場的瓶頸。如何在較短的時間內(nèi)開發(fā)出系統(tǒng)特性好、成本低、功能齊全、界面友好的多自由度并聯(lián)機器人控制系統(tǒng)是一項挑戰(zhàn)性的工作。
本文以6-PPPS并聯(lián)機器人為控制對象,以NI公司的系列軟硬件產(chǎn)品為基礎(chǔ),依托國家自然基金(No. 30770538)的支持,快速開發(fā)了此并聯(lián)機器人的開放式數(shù)字控制系統(tǒng)。
系統(tǒng)總體的設(shè)計
本課題所研究的并聯(lián)機器人的驅(qū)動由六個高精度的伺服電機及其驅(qū)動器承擔(dān),每一軸上都設(shè)有前限位、后限位及原點三個開關(guān),共18個I/O量。電機驅(qū)動需要進行以位置反解為基礎(chǔ)的軌跡規(guī)劃,使機器人的末端執(zhí)行器以一定的軌跡準確到達預(yù)定位置,并根據(jù)預(yù)先規(guī)劃的軌跡進行工作,因此,并聯(lián)機器人的軌跡規(guī)劃和反解運算需要一個性能強大的計算器進行計算和存儲,并且這些存儲的數(shù)據(jù)實時地傳送到作為下位機的控制卡和驅(qū)動器上,以產(chǎn)生用于驅(qū)動電機的電流或電壓。考慮到系統(tǒng)需要大量的數(shù)據(jù)傳遞、精確同步以及I/O信號種類多的特點,我們首先選擇了PXI開發(fā)平臺,這是因為PXI不僅具有業(yè)內(nèi)最高的總線帶寬和最低的傳輸延遲,而且提供從DC到6.6 GHz RF的各種模塊化的I/O。為了適應(yīng)本系統(tǒng)進一步升級和后續(xù)模塊的嵌入,我們選擇了高性能的8槽機箱。控制器則采用內(nèi)嵌2.2GHz Intel 奔騰4處理器的PXI-8186以滿足機器人軌跡規(guī)劃反解和數(shù)據(jù)分析的快速性。PXI-6511工業(yè)數(shù)字I/O接口板作為外圍模塊提供多達64路的隔離數(shù)字輸入。至于機器人控制系統(tǒng)的軟硬件具體設(shè)計和選型,我們將分別在下面逐一介紹。控制系統(tǒng)硬件之間的關(guān)系如圖1.
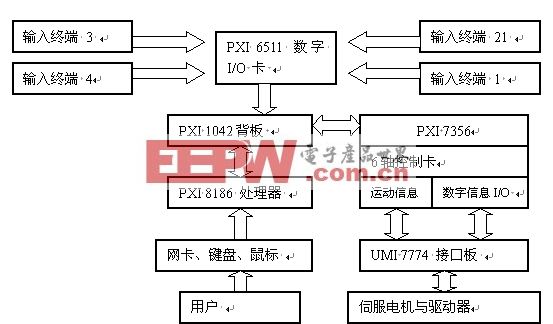
圖1.6-DOF并聯(lián)機器人控制系統(tǒng)的各部分之間的關(guān)系
控制系統(tǒng)硬件設(shè)計
由于本并聯(lián)機器人作為染色體切割裝備系統(tǒng)的宏動子系統(tǒng),肩負著除染色體最終切割以外的絕大部分任務(wù),具有高的定位精度和大的工作空間要求。其基本機構(gòu)是一6-PPPS解耦的空間六自由度并聯(lián)機構(gòu),由六個高精度伺服電機驅(qū)動實現(xiàn)空間六維運動(X、Y、Z三個方向的移動和繞X、Y、Z三個方向的轉(zhuǎn)動),因為末端平臺要達到微米級精度和六個電機的協(xié)調(diào)控制,所以我們選用了NI公司性能卓越的PXI-7356多軸運動控制卡。此多軸運動控制卡的緩存斷點技術(shù)有效的提高了積分速度,對于一般的位置斷點能夠以2kHz的速率計算觸發(fā)點,對于等距分布點則能夠以高達4MHz的速率計算;此卡的兩軸PID控制周期可以達到62.5μs,8軸PID控制周期可以達到250μs,實時性遠遠高于一般試驗控制1ms的要求,如此高的計算效率適應(yīng)了本系統(tǒng)的快速響應(yīng)的特性。PXI-7356多軸運動控制卡的多軸同步時間小于一個采樣周期;其位置精度較高,位置反饋時位置誤差不超過正負一個正交碼盤計數(shù)(quadrature count),模擬量反饋時應(yīng)用其內(nèi)置的8路16位模擬量輸入采集功能,極大的提高了模數(shù)轉(zhuǎn)換的分辨率,使其位置誤差不超過一個最低有效位(LSB),如此高的精度為系統(tǒng)高精度的要求提供了很好的保障。另外,PXI-7356多軸運動控制卡自身的安全標準、S曲線調(diào)節(jié)功能、雙PID控制環(huán)以及多軸之間的電子齒輪配合能夠為系統(tǒng)提供可靠的穩(wěn)定性。PXI-7356多軸運動控制卡及其配套的運動控制接口UMI-7774端口板具有用來控制固態(tài)繼電器和讀取數(shù)字編/譯碼器的64位數(shù)字I/O,使得系統(tǒng)中諸如18路限位、12路使能及眾多的報警等信號讀取和輸出更為方便快捷。鑒于以上考慮,我們認為NI公司的PXI-7356多軸運動控制卡及其配套模塊式適合本系統(tǒng)的要求,并選用。











評論