Modbus轉CANopen協議相互轉換在工業中的作用

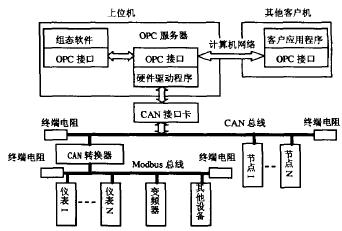
在工業自動化領域,Modbus和CANopen協議都是非常常見的通信協議。Modbus是一種串行通信協議,常用于連接PLC和傳感器/執行器。而CANopen是一種基于CAN總線的應用層協議,廣泛應用于汽車和工業自動化領域。在某些應用中,可能需要將Modbus協議轉換為CANopen協議。這可以通過使用專門的Modbus轉CANopen協議網關來實現。本文將介紹這種網關的基本原理、硬件構成和軟件實現方法。

協議轉換原理:Modbus和CANopen協議之間進行轉換的基本原理是將Modbus協議的消息解析為CANopen協議的消息,反之亦然。這需要實現以下兩個主要步驟:1. 消息解析:將Modbus協議的消息解析為原始數據,例如傳感器/執行器的狀態或PLC的指令。2. 消息轉換:將原始數據轉換為CANopen協議的消息,以便在CAN總線上傳輸。

軟件實現Modbus轉CANopen協議網關的軟件實現方法主要包括以下幾個步驟:
1. 初始化:在程序啟動時,需要對微控制器、CAN總線接口、Modbus接口等進行初始化。這包括設置通信參數、配置中斷等。
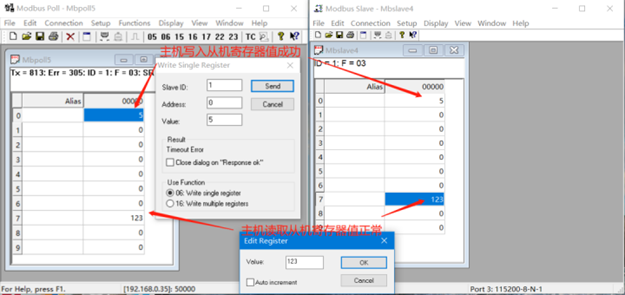
2. 消息解析:在接收到Modbus協議的消息時,程序需要將其解析為原始數據。這可以通過調用Modbus庫函數(如libmodbus)來實現。
3. 消息轉換:將解析得到的原始數據轉換為CANopen協議的消息。這需要根據CANopen協議的規范進行實現。通常需要定義一個數據結構來表示CANopen協議的消息,然后將原始數據填充到這個數據結構中。
4. 發送消息:將轉換得到的CANopen協議的消息發送到CAN總線上。這可以通過調用CAN總線接口的函數(如can_send)來實現。
5. 接收消息:在接收到CAN總線上傳來的消息時,程序需要將其解析為原始數據。這可以通過調用CAN總線接口的函數(如can_receive)來實現。
6. 反饋控制:根據原始數據執行相應的控制操作,例如調整傳感器/執行器的狀態或向PLC發送指令。這通常需要調用相應的庫函數或API來實現。

*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。