「電路分享」船用回聲測(cè)深聲納

過去探空(海底測(cè)量)是用“子彈”來完成的,也就是說,海員們把一個(gè)沉重的鉛物體吊在校準(zhǔn)過的繩子上。子彈一到底部,深度就直接從繩子的校準(zhǔn)值上看出來了。這種安排在一些游艇上仍然存在。這種方法的最大缺點(diǎn)是它只能在停止位置或非常低的速度下使用,而且也不容易進(jìn)行深部測(cè)量。我們將要建造的電子聲納沒有這些缺點(diǎn),它的指示可以和其他導(dǎo)航儀器一起在駕駛艙中完成。它本質(zhì)上是一個(gè)聲納系統(tǒng),用來測(cè)量超聲波脈沖的****和從底部接收反射波之間的時(shí)間。超聲波****采用一種稱為水聲投影儀的聲波換能器,而反射信號(hào)則由水聽器接收。

通常的電子聲納裝置包括一個(gè)超聲波****,它****150-200kHz的短超聲波脈沖。這種脈沖在底部反射,其回波由水聽器檢測(cè)。水聽器將回聲轉(zhuǎn)換成電信號(hào),用來照亮由電機(jī)以固定頻率移動(dòng)的小霓虹燈,放在同心校準(zhǔn)盤上。因此,霓虹燈在與測(cè)量深度相對(duì)應(yīng)的細(xì)分中發(fā)光。
由于超聲波****發(fā)生在燈從零通過的瞬間,圓盤的刻度校準(zhǔn)直接指示深度。經(jīng)驗(yàn)豐富的海員仍然可以從燈光照射的方式了解海底的類型。在底部閃爍的時(shí)間較長時(shí),沙質(zhì)巖石閃爍的時(shí)間較長。
我們的建筑有一個(gè)數(shù)字標(biāo)志,不幸的是,它沒有提供任何關(guān)于底部類型的詳細(xì)信息。但它更小,能更準(zhǔn)確地顯示深度。

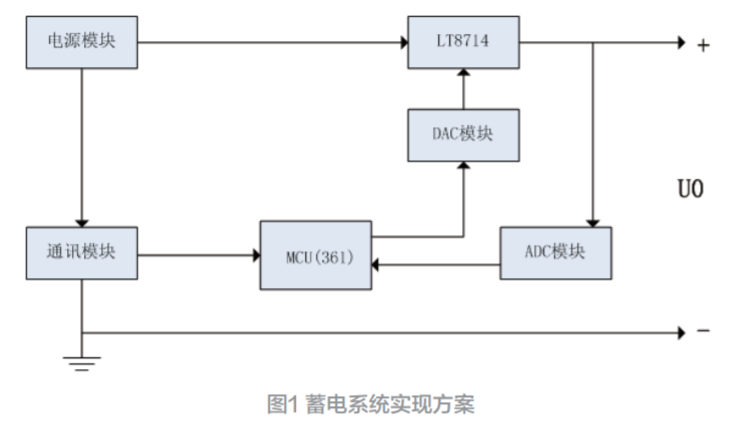
正如功能圖所示,它很容易構(gòu)建。一個(gè)有趣的簡(jiǎn)化是****機(jī)和水聽器嵌入在同一個(gè)外殼中。收發(fā)器連接到IC9(美國國家半導(dǎo)體公司的LM 1812)。
電路聲納超聲波脈沖傳播的距離是水深的兩倍。由于水中平均聲速為1500m/s(20°C,含鹽量為2%),雙向深度覆蓋所需時(shí)間,如7.5m為10ms,因此,如果IC1的定時(shí)器頻率為750Hz,記錄10ms的脈沖到達(dá),則測(cè)深為7.5m,但由于顯示僅為整數(shù),顯示器將是7米。為了獲得更精確的讀數(shù),時(shí)鐘頻率可以是7500赫茲,因此聲音將精確到十分之一米。
顯示器、存儲(chǔ)器和成像驅(qū)動(dòng)器包含在IC1中。當(dāng)接收到回波時(shí),顯示器接收到來自IC9的停止脈沖。顯示信息隨后進(jìn)入存儲(chǔ)器,最后顯示在七段式LED中。
新的測(cè)量周期從零周期脈沖開始,每200ms產(chǎn)生一次IC5,最多可計(jì)數(shù)1500次。這意味著該電路可用于深度達(dá)1500十分之一米,即150米。復(fù)位信號(hào)執(zhí)行另外兩個(gè)功能,啟動(dòng)脈沖傳輸,并通過MMV4和FF2激活警報(bào)。如果在回波檢測(cè)時(shí)MMV4的輸出電平是邏輯1,則FF2的輸出宣告“淺層”的存在。報(bào)警閾值用P1從1m調(diào)整到10m。
Monostable MMV3在P2設(shè)定的特定時(shí)間內(nèi)沒有回聲檢測(cè)時(shí)關(guān)閉顯示。當(dāng)沒有收到回音時(shí),LED D2保持熄滅。顯示器一直工作到MMV2改變。當(dāng)接收到回聲時(shí),D2立即開始閃爍。
值得更仔細(xì)地研究IC9。這是設(shè)備的核心。下一個(gè)圖顯示了IC9的各個(gè)步驟以及必要的外圍元件。

當(dāng)IC5每200ms提供0.5s的脈沖持續(xù)時(shí)間時(shí),IC9引腳8激活內(nèi)置調(diào)制器并產(chǎn)生脈沖來傳輸超聲波,在我們的例子中是200kHz。調(diào)制器和第二高頻放大器(h.f.)共用協(xié)調(diào)電路L1/C14。在廣播中,這個(gè)電路連接到調(diào)制器,而接收器連接到放大器。這樣可以確保廣播和接收的調(diào)諧頻率相同。這個(gè)頻率的絕對(duì)值不是特別重要。
輸出級(jí)放大200 kHz脈沖信號(hào),并通過晶體管驅(qū)動(dòng)器T8和線圈L2驅(qū)動(dòng)超聲波****。L2,分布****電容和C22在200kHz下形成一個(gè)調(diào)諧電路。
在傳輸脈沖之間的間隔中,檢測(cè)和評(píng)估回波。它應(yīng)用于第一個(gè)高頻放大器(h.f.),然后通過P4傳輸?shù)降诙€(gè)放大器h.f.,后者現(xiàn)在連接到協(xié)調(diào)的L1/C14。電位計(jì)調(diào)整聲納靈敏度。選擇放大器的輸出驅(qū)動(dòng)一個(gè)電平檢測(cè)器,它對(duì)高于某個(gè)電平的信號(hào)作出反應(yīng)。接收信號(hào)中的噪聲脈沖通過脈沖中繼器和積分器檢測(cè)器的組合被丟棄。如果脈沖序列中斷,脈沖中繼器檢測(cè)器將接收到的回波判斷為偶發(fā),并導(dǎo)致C15集成電容器放電。
如果接收到的脈沖很短(如噪聲脈沖),則C15沒有完全充電,脈沖被隨機(jī)拒絕。然而,如果脈沖中繼器探測(cè)器達(dá)到真實(shí)回波的脈沖,驅(qū)動(dòng)成像被激活。如果顯示器工作時(shí)間過長,保護(hù)電路會(huì)停止顯示。這是通過從驅(qū)動(dòng)信號(hào)給C19充電來實(shí)現(xiàn)的:當(dāng)C19充電時(shí),它運(yùn)行一個(gè)內(nèi)置在IC中的晶體管。
C9確保脈沖傳輸后第二高頻的放大很小,因此****元件的任何振蕩都不會(huì)被回波。可測(cè)深度約為C9,因此可測(cè)深度不可接受。注意,在這種情況下,必須降低設(shè)備的靈敏度。
結(jié)構(gòu)和裝配最有趣的一點(diǎn)是安裝****/接收元件。下一個(gè)圖表提出了一些解決方案。

也可以想象,一條垂直于血管寬度的線是垂直的。最后可能需要將發(fā)送/接收元件放在適配器盒中,如上面的diargam所示。如果船體是玻璃纖維的,整個(gè)裝置可以放在船體內(nèi)部。電池與電路其余部分的連接電纜不得與其他電纜連接,以免受到噪聲脈沖的影響,從而降低電路的工作性能。注意這里:請(qǐng)勿縮短至發(fā)送/接收元件的電纜!如果你已經(jīng)有了這樣的東西。你不必買一個(gè)新的,因?yàn)槟銕缀蹩梢钥隙ㄋ鼘⑴c聲納電路很好地工作。
VDO Echo Soynder Modis 120(工作頻率為200 kHz)、Sacce、Euroromarine、Seafare(工作頻率均為150 kHz)具有難以區(qū)分的****/接收元件。你會(huì)在大多數(shù)船用電器/電子設(shè)備商店找到這些產(chǎn)品。

與****/接收元件的定位困難相比,在電路板上制作電路板是兒童的玩具。L2線圈必須纏繞在手上,但L1可以隨時(shí)購買。三位數(shù)顯示在第二塊板上。

穩(wěn)壓器及其冰箱放置在帶有合適絕緣體的銅表面上,或在適當(dāng)絕緣后,放置在箱體的一面墻上。在兩塊板之間,必須插入金屬板進(jìn)行屏蔽。帶有相同符號(hào)的兩塊板的觸點(diǎn)必須相互連接。
注意安全:接地連接與帶有CL的板不在同一側(cè)。
同一板上的DS觸點(diǎn)必須橋接在地上,DP連接到5V。
盒子可以是塑料的或金屬的,但不能滲透。安裝過程中,電位計(jì)、開關(guān)、LED和插座的軸必須防水。紅色展示窗用防水膠粘在盒子里。不要忘記12±2V時(shí)的連接。必須在將板放入盒中之前進(jìn)行設(shè)置。
設(shè)置首先設(shè)置P4為接收器的最大靈敏度。然后將****/接收元件垂直放置在距離反射面0.5米的范圍內(nèi)。如果物品已經(jīng)放置在其永久位置,在其前方0.5米處放置一個(gè)反射面(船不在水里!!)。然后設(shè)置L1的核心,直到顯示器顯示2.3米。這是因?yàn)樗械穆曇魝鞑ニ俣葍H為其在海上傳播速度的0.217。由于目標(biāo)在空中的距離為0.5m,因此在海上的等效距離為0.5m/0.217=2.3m。
然后改變****/接收元件和反射面之間的距離。空氣中的變化范圍為0.5-1.5米,對(duì)應(yīng)于海洋中23-6.8米的深度變化。描繪應(yīng)顯示距離的變化。如果沒有,則需要調(diào)整L1核心以實(shí)現(xiàn)真正的最大靈敏度。
如果你有示波器,設(shè)置有點(diǎn)簡(jiǎn)化。警告,因?yàn)槿绻瑫r(shí)觸摸IC9的兩個(gè)引腳上的振蕩器端子。你需要一個(gè)新的IC9。
將示波器探頭連接至IC9針腳1,并使示波器與IC9針腳3信號(hào)同步。然后將L1的核心設(shè)置為最大回波幅度。在****脈沖后幾毫秒可見。
顯示器工作時(shí)聲納的電流消耗約為200mA,12V時(shí)平均為40mA。
一些最后的細(xì)節(jié)線圈L2是手工制作的。它被包裹在一個(gè)直徑約為18毫米、高11毫米的合適芯中。二次繞組L2b的電感必須使得形成L2b的電路的諧振頻率、分布式****/接收透射率和C22與相同的****/接收元件頻率相同。
該頻率由關(guān)系式f=1/2πx L x C給出,其中f是諧振頻率,單位為Hz,L是H處的電感,C是總電容,單位為f。
逆項(xiàng),L=1/4π2x f2x C,對(duì)于f=200kHz,C=3n2,我們得到L2b=198μH。
相應(yīng)的匝數(shù)N由關(guān)系式N=L2b/Ls計(jì)算得出。式中,Ls是鐵氧體磁芯的特定電感。例如,如果Ls=250nH,則圈數(shù)變?yōu)?8圈。
如果線圈比為1:9,L2a必須有3圈。
如果使用具有不同特殊電感值的鐵氧體磁芯,上述計(jì)算當(dāng)然應(yīng)重新生成。匝數(shù)比可以保持在1:9。相應(yīng)地,如果使用不同的****/接收元件,則必須重新計(jì)算L2電感。
此外,如果頻率不是200 kHz,則C14必須通過以下公式重新計(jì)算:C14=1/4π2x f2x L1,其中f是新頻率,L1=630μH。
觸發(fā)“淺”報(bào)警的深度由以下因素決定關(guān)系:深度(m) =9 x 106x(P1+R16+R17),其中R16、R17和P1的單位為Ω。
如果發(fā)送/接收元件不在船舶最深點(diǎn),測(cè)量元件位置與龍骨較深點(diǎn)之間的距離Dk(深度差)。
將4098(IC6)更換為4538。將C9 12n與R13串聯(lián),電阻Rk的值由關(guān)系式Dk=9 x 106x(Rk+104)計(jì)算得出,其中Dk以m為單位,nRk以Ω為單位。
因此,Rk=(106Dk/9)-104。
例如,Dk=1.5m Rk=157k。此后,顯示器將顯示從船舶最深點(diǎn)到海底的距離,而不是從****/接收元件的位置。
注意:設(shè)置P1時(shí),應(yīng)考慮Dk。
主PCB元件電阻器
R9 = 10M
R10, R14, R21, R22 = 1k
R11 = 11k
R12 = 470k
R13, R15, R17-R20, R25 = 10k
R16, R23 = 100k
R24 = 1M
R26, R27, R28, R31 = 5k6
R29, R30 = 100Ω
R32 = 10Ω
R33 = 5Ω6
P1 = 1M linear potentiometer
P2 = 1M pre-set
P3 = 100k adjustable
P4 = 5k, linear potentiometer
電容器
C4 = 10p
C5 = 22p
C6 = 560p
C7 = 10n
C8, C12, C16, C26 = 100n
C9, C10, C14, C17 = 1n (see text for C14).
C11 = 10μ / 16V
C13 = 12n MKT
C15, C18 = 220n
C19 = 680n
C20 = 2n2
C21 = 150p (400V)
C22 = 1n5 (400V) (see text)
C23 = 220μ / 25V
C24 = 470m / 16V
C25 = 100μ / 16V
半導(dǎo)體
D1, D3 = 1N4148
D2 = LED
T5, T7 = BC547B
T6 = BC160
T8 = BD140
IC3 = 4060
IC4 = 40102
IC5 = 555
IC6 = 4098 (or 4538, see text)
IC7 = 4538
LCMS = 4013
IC9 = LM1812 (National Semiconductor)
線圈
L1 = 630μH = YAN60033 (Toko)
L2 = see text
其他
S1、S2、SPST鎖
X1 = quartz crystal 6MHz
150 kHz或200 kHz傳感器
電阻器
R1-R7 = 22Ω
R8 = 82Ω
電容器
C1 = 10μ / 10V tantalum
C2a = 470m / 16V
C3 = 100n
半導(dǎo)體
DP2-DP4 = 7760 (D)
T2-T4 = BC140
IC1 = 74C928
IC2 = 7805
其他
IC2散熱器(5°C/W)
*博客內(nèi)容為網(wǎng)友個(gè)人發(fā)布,僅代表博主個(gè)人觀點(diǎn),如有侵權(quán)請(qǐng)聯(lián)系工作人員刪除。