還可以這樣實現ARM+ROS(機器人操作系統)

如何低成本搭建ARM+ROS的硬件載體?本文將為讀者提供一個全新的技術方案。全文分概述、硬件與底層、ROS搭建三個章節,敬請訂閱。
ROS是機器人操作系統(Robot Operating System)的英文縮寫,是用于編寫機器人軟件程序的一種具有高度靈活性的軟件架構,其原型源自斯坦福大學的Stanford Artificial Intelligence Robot (STAIR) 和 Personal Robotics (PR)項目。

ROS是一個用于實現機器人編程和開發復雜機器人應用程序的開源軟件框架,依托于Linux之類的操作系統上,所以ROS也被稱為元操作系統或中間件軟件框架。ROS提供了各類成熟的功能包,如:攝像頭驅動、OpenCV圖像處理、SLAM建圖導航等。功能包中的代碼可以是C++、Python、Octave等不同的編程語言編寫,雖然不同模塊基于不同語言編寫,但仍可以被ROS組合起來一起使用。這意味著,當開發新款機器人時,開發者不需要做基礎的傳感器驅動、甚至不必實現某些應用,直接調用ROS自帶的功能包,同時ROS是分布式架構,對于大型復雜機器人而言,可以把各個功能分別部署在不同控制板上。

本文檔使用本司的HDG2L-IoT評估套件來實現ROS應用環境,硬件產品如下所示。

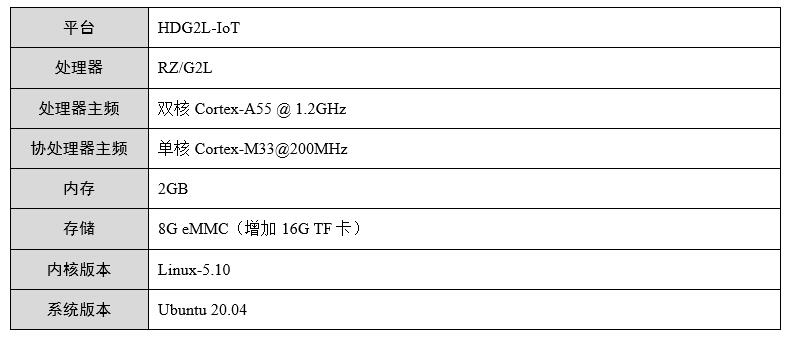
硬件平臺環境條件如下所示:
表2.1 硬件平臺資源
目前實現ROS的方式主要有兩種:
Ubuntu系統+ROS;
Ubuntu系統+docker+ROS鏡像;
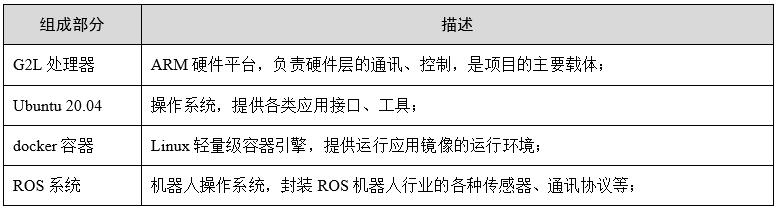
相對而言,使用dockers運行ROS鏡像的部署方式,可以大大加快設備部署、移植工作。第二章節也將基于方案2去實現ROS,組成項目的各個部分功能如下所示:
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。








