突破!兩項(xiàng)世界冠軍!
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
“我們是世界冠軍!”
在得知獲得2022年機(jī)器人世界杯(RoboCup)救援機(jī)器人的兩項(xiàng)世界冠軍之后,國(guó)防科技大學(xué)智能科學(xué)學(xué)院NuBot機(jī)器人團(tuán)隊(duì)成員發(fā)出了這樣的吶喊。

團(tuán)隊(duì)主要成員合影
NuBot團(tuán)隊(duì)在此次比賽中取得兩項(xiàng)冠軍一項(xiàng)亞軍的好成績(jī),這也是該校在該賽事上取得的最好成績(jī),實(shí)現(xiàn)了我國(guó)在這些項(xiàng)目上的突破,標(biāo)志該團(tuán)隊(duì)進(jìn)入世界第一梯隊(duì),在特種機(jī)器人領(lǐng)域形成一定的局部?jī)?yōu)勢(shì)。
以下視頻來(lái)源于
國(guó)防科大
RoboCup (Robot World Cup)機(jī)器人世界杯是世界機(jī)器人競(jìng)賽領(lǐng)域影響力非常大、綜合技術(shù)水平高、參與范圍廣的專業(yè)機(jī)器人競(jìng)賽,由加拿大大不列顛哥倫比亞大學(xué)教授 A1an Mackworth 在1992年次提出的。其目的是通過機(jī)器人比賽,為人工智能和智能機(jī)器人學(xué)科的發(fā)展提供一個(gè)具有標(biāo)志性和挑戰(zhàn)性的課題,為相關(guān)領(lǐng)域的研究提供一個(gè)動(dòng)態(tài)對(duì)抗的標(biāo)準(zhǔn)化環(huán)境。
其中,救援機(jī)器人組比賽的目的是為促進(jìn)城市搜救機(jī)器人技術(shù)的研究與發(fā)展,通過競(jìng)賽可以為救援機(jī)器人在復(fù)雜環(huán)境下運(yùn)行提供性能客觀評(píng)價(jià)標(biāo)準(zhǔn)。比賽中,各參賽隊(duì)需要完成具有挑戰(zhàn)性的任務(wù),控制救援機(jī)器人在迷宮式的場(chǎng)地中搜救模擬的受困者,在完成任務(wù)的過程中充分展示其救援機(jī)器人性能(機(jī)動(dòng)性,感知能力,定位建圖能力,操作界面,遠(yuǎn)程操控性、自主能力等)。比賽是一個(gè)救援機(jī)器人技術(shù)進(jìn)步展示的舞臺(tái),也是檢驗(yàn)救援機(jī)器人系統(tǒng)的實(shí)驗(yàn)場(chǎng)。比賽的最終目標(biāo)是將機(jī)器人用于真正的救援任務(wù)。
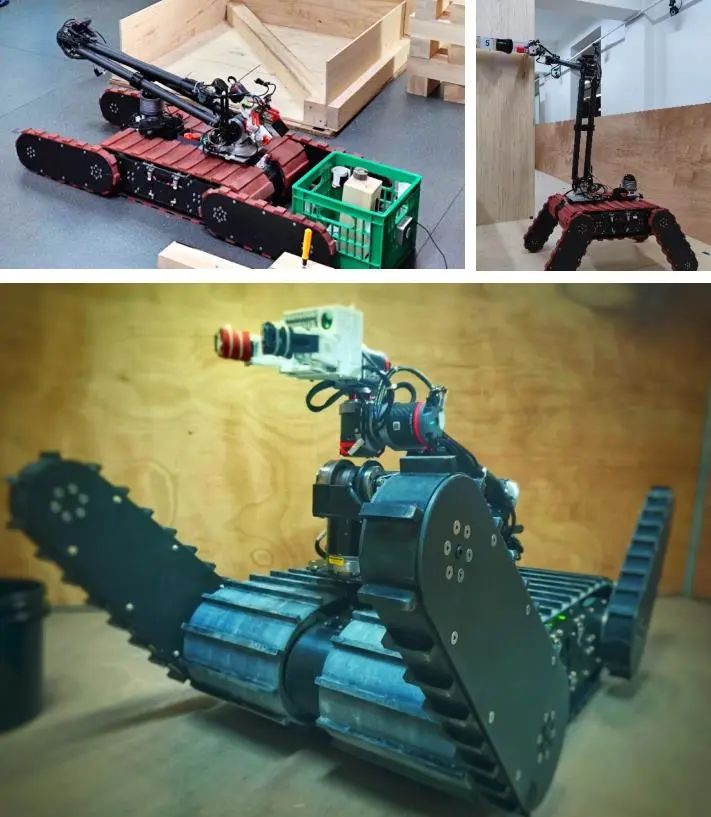
NuBot救援機(jī)器人
受新冠疫情影響,今年的RoboCup救援機(jī)器人比賽采用線上+線下的參賽模式,分為操控性項(xiàng)目、運(yùn)動(dòng)性項(xiàng)目、機(jī)械臂靈巧操作項(xiàng)目、探索與建圖項(xiàng)目、搜索與探測(cè)項(xiàng)目等5個(gè)大項(xiàng)共28個(gè)小項(xiàng)。
機(jī)械臂靈巧操作DEX項(xiàng)目比賽場(chǎng)景

探索與建圖EXP項(xiàng)目比賽場(chǎng)景
國(guó)防科技大學(xué)NuBot參加了三個(gè)項(xiàng)目,成功斬獲探索與建圖EXP、搜索與探測(cè)SAI兩項(xiàng)世界冠軍以及機(jī)械臂靈巧操作DEX項(xiàng)目亞軍,成為了本屆賽事冠軍數(shù)量并列第一、冠亞軍數(shù)量第一的隊(duì)伍。
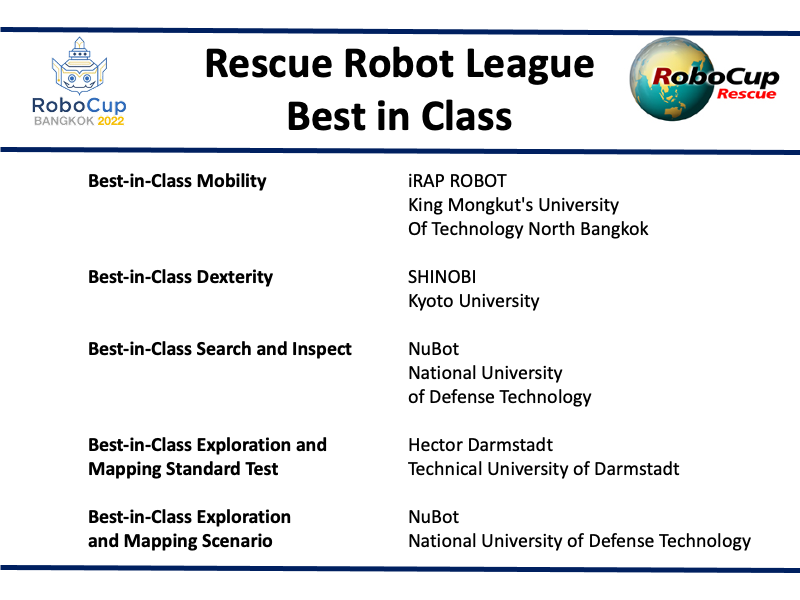
比賽結(jié)果
機(jī)器人底盤的設(shè)計(jì)者——博士生陳柏良每年都會(huì)對(duì)機(jī)器人的底盤進(jìn)行優(yōu)化,使目前該自重僅45kg的底盤能實(shí)現(xiàn)載重65kg的情況下攀爬45度斜坡,并與碩士生潘海南一起開發(fā)基于強(qiáng)化學(xué)習(xí)的擺臂自主規(guī)劃算法,讓機(jī)器人能夠自主翻越樓梯、梅花樁等復(fù)雜障礙。
博士生程創(chuàng)在過去的一年里不斷迭代設(shè)計(jì)多款機(jī)械臂,形成了一套自重低、臂展長(zhǎng)、負(fù)載高的機(jī)械臂設(shè)計(jì)方法,實(shí)現(xiàn)了自重僅5kg的機(jī)械臂遠(yuǎn)端(1.5m處)提重5.11kg(小項(xiàng)第一),并與碩士生曾瑞涵一起開發(fā)了機(jī)械臂避奇異逆解遙操作算法以及機(jī)械臂末端穩(wěn)定控制算法,為實(shí)現(xiàn)搜索與探測(cè)SAI項(xiàng)目冠軍、機(jī)械臂靈巧操作DEX項(xiàng)目亞軍提供了關(guān)鍵支撐。
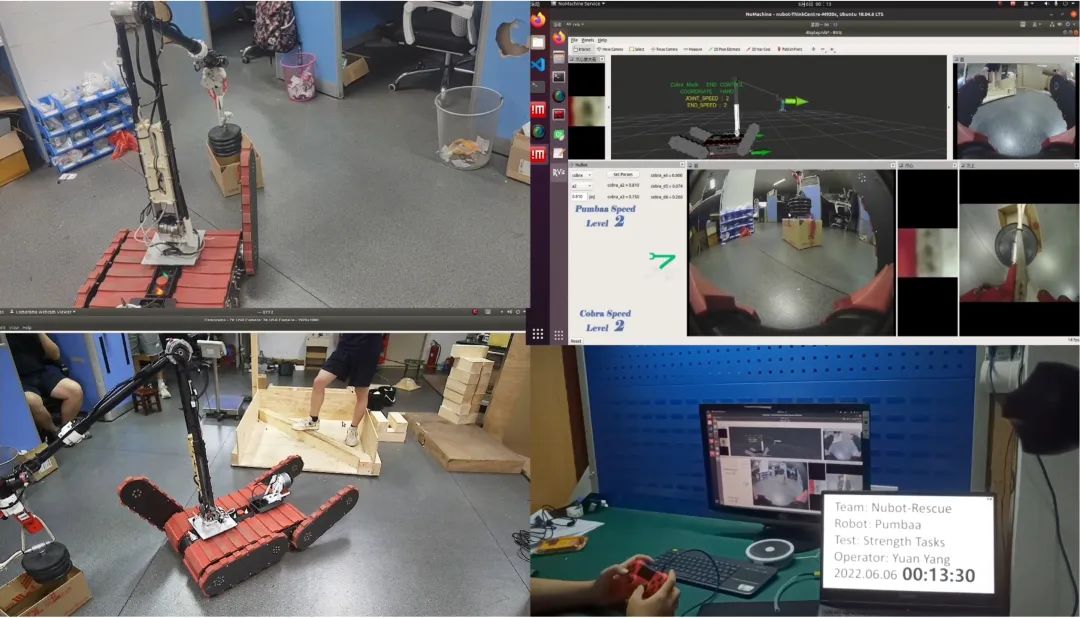
基于數(shù)字孿生的人機(jī)交互界面
博士生施成浩將其在頂級(jí)國(guó)際會(huì)議中發(fā)表的最新科研成果應(yīng)用在此次比賽中,實(shí)現(xiàn)了機(jī)器人在不平穩(wěn)地形下的快速高精度建圖,13分鐘就建立了大型試驗(yàn)場(chǎng)地的全局地圖,是NuBot能夠蟬聯(lián)探索與建圖EXP項(xiàng)目冠軍的重要保障。
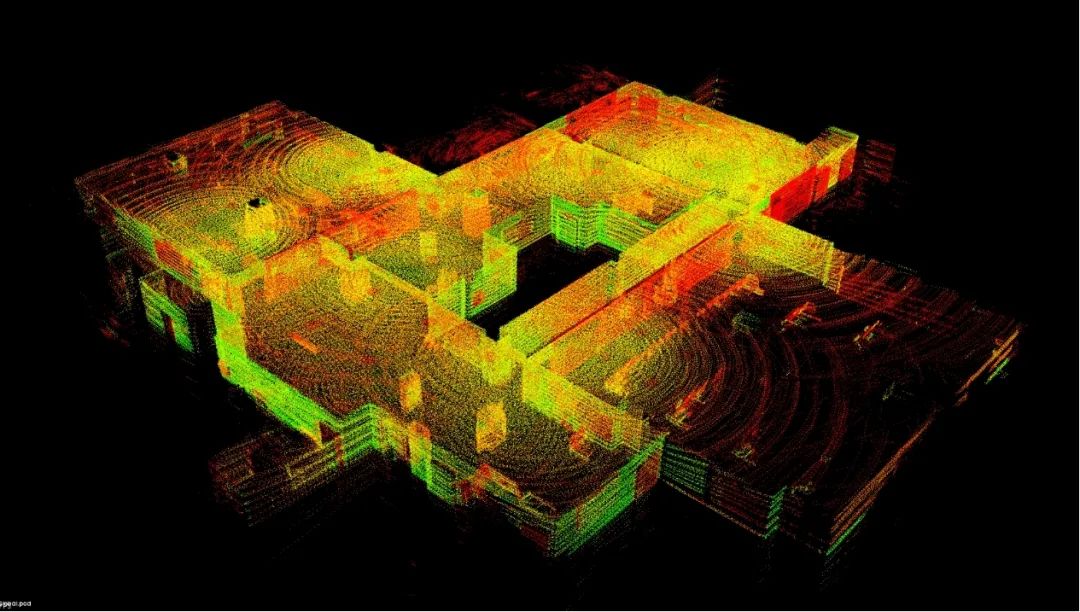
大范圍場(chǎng)景快速高精度建圖(室內(nèi)環(huán)境)
博士生鄧文邦、朱騰達(dá)則負(fù)責(zé)機(jī)器人的通信系統(tǒng)和能源系統(tǒng),保證了機(jī)器人穩(wěn)定高效運(yùn)轉(zhuǎn),同時(shí)鄧文邦作為此次比賽的隊(duì)長(zhǎng),還負(fù)責(zé)比賽的組織與直播解說(shuō),現(xiàn)場(chǎng)用流利的英文同組委會(huì)專家進(jìn)行交流。
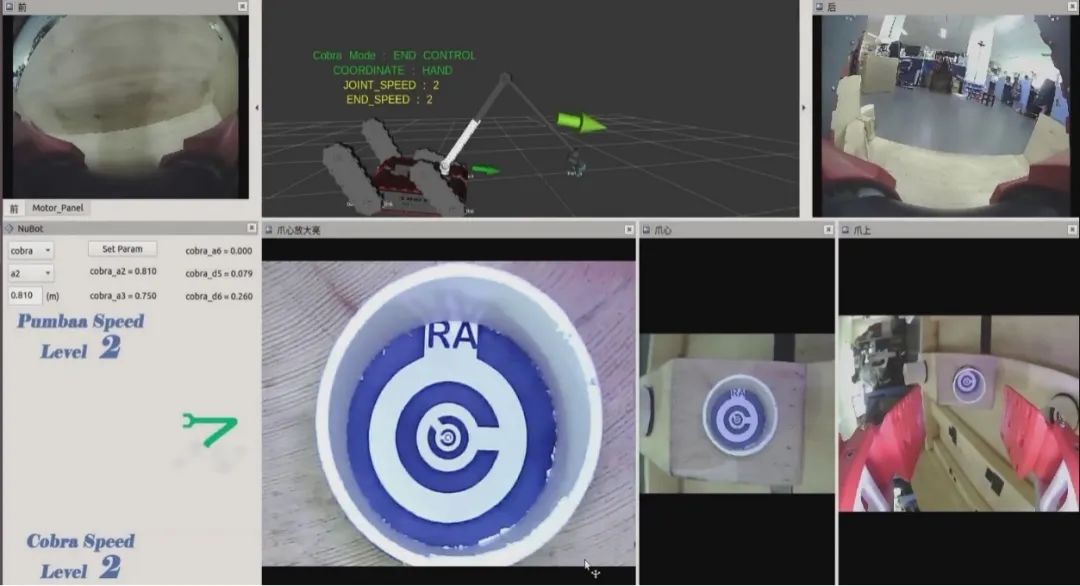
2021級(jí)學(xué)員王能、龔舜杰等擔(dān)任此次比賽的操作手,他們利用課余時(shí)間全身心投入操作訓(xùn)練,并不斷在訓(xùn)練中優(yōu)化人機(jī)交互系統(tǒng)、感知系統(tǒng)布局,使機(jī)器人的操作性能有了顯著提升,實(shí)現(xiàn)了超視距下快速插孔、壘木樁等精細(xì)化操作。23min內(nèi)成功搜尋并觀測(cè)到46個(gè)亞毫米級(jí)目標(biāo)物,獲得了遙遙領(lǐng)先的184分,打破了賽事紀(jì)錄。
“喜悅之后,認(rèn)清形勢(shì),丟掉追趕者的身份,下一步的提升與創(chuàng)新將變得更加具有挑戰(zhàn)。”NuBot團(tuán)隊(duì)導(dǎo)師、智能科學(xué)學(xué)院教授盧惠民說(shuō)。
來(lái)源:綜合國(guó)防科技大學(xué)、RoboCup機(jī)器人世界杯中國(guó)賽官方網(wǎng)站/科創(chuàng)中國(guó)
*博客內(nèi)容為網(wǎng)友個(gè)人發(fā)布,僅代表博主個(gè)人觀點(diǎn),如有侵權(quán)請(qǐng)聯(lián)系工作人員刪除。
