摘要:文章主要描述仿生機器蛇的設計,包括機器蛇的結構設計和運動規劃連貫動作的實現。通過對蛇形機器人在有障礙物和無障礙物環境中,進行不同連貫動作的運動規劃和運動形式變化,找出機器人設計的不同側重點;最后,
關鍵字:
蛇形機器人 仿生 運動規劃
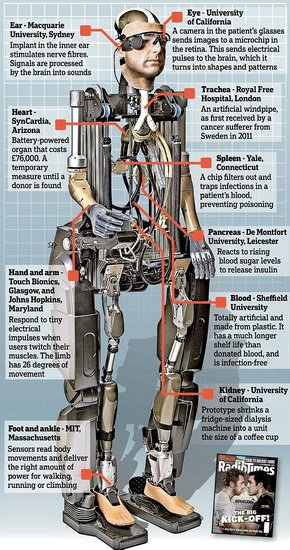
據英國每日郵報報道,目前,科學家花費100萬美元打造一個真實的仿生機械人,它是由假肢和人造器官構成的。它被稱為“雷克斯(Rex)”,是機械外骨骼仿生人的意思,身高可達到2米,是由從世界各地研制的人造肢體和器官構成。近年來,科學家在先進假肢和人造器官領域的突破性發展,意味著很快不僅能夠置換失去的身體器官,還能進一步增強其功能性。
科學家建造的這個仿生機械人“雷克斯”,是由來自世界各地研制成功的人造肢體和器官構成
英國第4頻道節目主持人貝
關鍵字:
仿生 機器人
我們知道,人類所有的靈感都是大自然的饋贈,開發最新技術的靈感來自大自然:為能更快地為鋰離子電池的多孔電極灌注液體電解質,德國卡爾斯魯爾技術研究院(KIT)的科學家利用一種與樹木傳輸水分相仿的物理化學效應,開
關鍵字:
分析 技術 仿生 電池 鋰離子
這是一個簡單到令人發指的仿生避障機器人,僅由電池、開關、馬達組成最基礎的電學電路,就能表現出類似自然界生物的智能!在遇到障礙物時會掉頭,看起來有 點象一只瘋狂的小強。只要有基本的物理電學基礎就可以自
關鍵字:
機器人 制作 仿生 電路 電學 基礎
DSP實現仿生機器蟹多關節控制系統,仿生機器蟹控制系統需要較高的控制精度和運算速度,以便在機械結構剛度較高的情況下,通過提高響應速度來確保機器人的正常行走和姿態控制。由于在機器蟹腿節和脛節置有兩個電機(如圖1所示),使其質量較大,同時由
關鍵字:
關節 控制系統 機器 仿生 實現 DSP
以仿生機器魚實驗平臺為載體,介紹基于 PIC18F452單片機的舵機控制方法。主要圍繞舵機的角度控制和速度控制進行了深入淺出的介紹,并給出了相應的程序實例。
關鍵字:
機器 控制 仿生 單片機 PIC 基于 收發器
假肢研究的重點是生理信號的提取和對仿生假手的控制。將肌音信號作為假肢控制的生理信號源,現以放大電路和濾波電路為核心,實現了能采集肌音信號的電路系統設計。通過采集軟件,將數據導入Matlab進行特征分析,討論并驗證了電路的全部功能,運用該電路采集到了符合要求的肌音信號。該設計是一種實用的肌音信號前端采集電路。
關鍵字:
信號 設計 系統 仿生 基于 采集 功率模塊
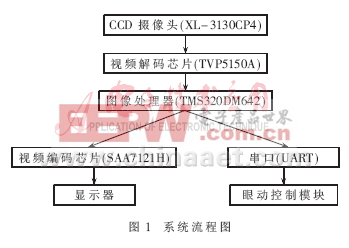
基于TI TM320DM642的仿生眼視覺圖像處理系統,為研制仿生眼球,構建了一個嵌入式的基于仿生控制的視覺圖像處理系統。根據仿生眼對視覺系統的要求,設計了一個以TMS320DM642 DSP為核心,以TVP5150、SAA7121H為編解碼模塊的視覺圖像處理系統;實現了仿生眼視覺識別的一系列軟件開發,包括實時圖像采集、視頻圖像處理、視頻輸出及目標位置參數傳遞等功能;在CCS2.2的環境下,對視覺識別算法進行了探索,用經典的Prewitt算法以及改進的Prewitt算法對系統進行實驗測試。
關鍵字:
圖像 處理 理系 視覺 仿生 TI TM320DM642 基于 數字信號
英國曼徹斯特的彼得·萊恩先生首次看到了物體的輪廓并能閱讀文字,這要多虧了一種全新的“仿生眼”設備。目前這種設備正在全球小范圍內試用,一旦推廣,有望為更多因遺傳病致盲的患者帶來光明。這種先進的“仿生眼”主要針對因視網膜色素變性而致盲的患者。視網膜色素變性是一種常見的與遺傳相關的致盲性眼病,表現為漸進式周邊視野缺損和夜間視力模糊,最終失明。
“仿生眼”設備主要包括一副裝有攝像頭和信號傳送器的眼鏡、一個視頻處理器、一
關鍵字:
醫療電子 仿生 電子仿生眼
波動仿生推進器是一種依據魚類仿生學原理設計的新型水下推進器。控制器局域網(Controller Area Network,即CAN總線)是一種能有效地支持具有很高安全等級的分布實時控制的串行通信協議。基于波動仿生推進器內部環境及多電機獨立控制結構的特點,采用CAN總線來構建波動仿生推進器內部的通信網絡。文章對CAN總線在波動仿生推進器上的應用方案進行了系統闡述,提出了具體的軟硬件解決方案,并對其中的一些關鍵點進行了說明。此外,對波動仿生推進器的波動控制技術,即多電機的協調控制方法也作了相應論述。
關鍵字:
CAN 總線 波動 仿生
仿生機器蟹控制系統需要較高的控制精度和運算速度,以便在機械結構剛度較高的情況下,通過提高響應速度來確保機器人的正常行走和姿態控制。由于在機器蟹腿節和脛節置有兩個電機(如圖1所示),使其質量較大,同時由于體積的限制使得各步行足相互間距較小,因此將造成機器蟹在行走過程中耦合較強,控制模型受軀體位姿、步行足位形和步態等因素的影響較大。這就要求控制系統控制結構靈活,具有調整步行足軌跡和步態的能力,并能適應控制模型的變化。因此必須研制一種具有強大運算處理能力、軟硬件結構模塊化的機器蟹控制系統。
從作業
關鍵字:
機器人 仿生 機器蟹 伺服控制器
仿生介紹
您好,目前還沒有人創建詞條仿生!
歡迎您創建該詞條,闡述對仿生的理解,并與今后在此搜索仿生的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473