CAN總線在波動仿生推進器中的應用

作為一種面向水下航行器的新型仿生推進裝置,波動仿生推進器主要模擬依靠身體波動式推進的魚類的游動方式,以單柔性長鰭的波動推進為基礎,利用多背鰭之間的協同控制來產生推力、升力、偏航和俯仰力矩。在機構設計上,一個單柔性長鰭由若干根鰭條組成,通過對這若干根鰭條進行不同的配置,可以實現單柔性長鰭不同的波形。而波形參數(波長、波幅、波頻、波傳播方向等)的不同將直接影響到單柔性長鰭所產生推力的大小。在研究初期,需要對單柔性長鰭進行靈活控制,以便確定推進效率最優的波形參數。為此,我們設計了一種多電機獨立控制方案,即由一個電機控制一根鰭條,通過電機之間的協調來實現對單柔性長鰭的波動控制。
本文引用地址:http://www.104case.com/article/188723.htmCAN(ControllerAreaNetwork)總線,又稱控制器局域網,是Bosch公司在現代汽車技術中領先推出的一種多主機局部網,也是一種串行通訊協議。其卓越的可靠性和傳輸的高速性,使它能夠有效地支持具有很高安全等級的分布式實時控制。CAN總線現在已廣泛應用于工業現場控制、智能大廈、環境監控等眾多領域,從高速的網絡到通用的多路接線都可以使用。在汽車電子行業里,使用CAN總線連接發動機控制單元、傳感器、防剎車系統等,其傳輸速度可達1Mbit/s。波動仿生推進器多電機系統內部通訊總線與汽車內部總線有很多相似的特性,如都處于強機械震蕩、強電磁干擾環境等,而且CAN總線在機器人內部通訊系統中的應用已經有了許多成功的先例。因此在波動仿生推進器的內部通訊總線設計中采用CAN協議。
1系統總體結構
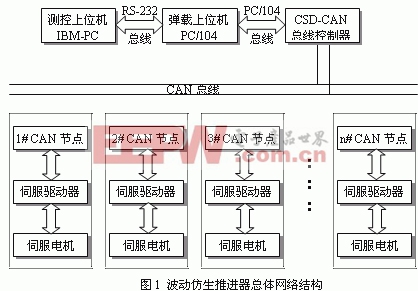
水下波動仿生推進器采用分級控制的思路,總體網絡結構如圖1所示。在岸上,以一臺IBM-PC機作為操控平臺,實現操縱命令的給定、彈載內部運行狀態的監測與可視化管理以及人機界面的功能。它通過RS-232總線連接到仿生推進器內部的主控上位機PC/104上。PC/104是仿生推進器運動控制的核心模塊,負責實現除底層電機控制模塊以外的所有上層控制算法,包括多電機的波形控制、姿態與深度測量、安全狀態監控等。其中,多電機的波形控制是通過PC/104對底層若干個電機控制節點的協調來實現的,通過采用基于CAN現場總線的串行通信協議,保證了通信的可靠性及實時性。
在本系統中,核心控制部分采用SBS公司的PC/104模塊,并通過該公司集成的基于PC/104的CSD-CAN總線控制器與波動仿生推進器內部的各控制節點組成CAN通信網絡。在底層各電機控制節點上,采用日本安川公司模塊化SGMAH04型交流伺服電機和相應SGDM04ADA型伺服驅動器。該伺服驅動器可通過自帶的RS-232串口(CN3)與數字操作器或者PC聯接,通過編碼器接頭(CN2)聯接編碼器至伺服電機,同時它還提供一個實時I/O端口(CN1)可與運動模塊MP910等或其它上級裝置聯接。向其I/O端口發送脈沖序列可以對電機進行速度和位置控制,向其串口發送命令指令可以獲取電機當前的速度和位置信息。這樣,我們可以跳過最底層與電機接口部分的軟硬件開發,而通過單片機直接對伺服驅動器進行控制。在各個電機控制節點上,研制相應的CAN智能節點以實現與彈載上位機PC/104的通信。
波動仿生推進器中CAN網絡必須具備波形控制和狀態監控兩大功能。對于該多電機系統,各個節點相互獨立,通過在PC/104中對這若干個節點進行合理的調配來實現波動仿生推進器的波形控制功能。另外,各CAN節點實時監測本控制節點對應電機的工作狀態,并將其返回給上位機;同時,各CAN節點定時監測節點本身的工作狀態,利用CAN總線協議強大的錯誤處理功能對各種可能出現的錯誤進行分析處理。
2CAN網絡的硬件方案
由圖1可知,各個CAN節點直接掛接于同一個CAN網絡。它們的軟硬件組成結構完全一致,硬件組成框圖見圖2。
系統中的各CAN節點采用的都是智能節點,即都由微控制器和可編程的CAN控制芯片組成。從圖2可以看出,各CAN節點電路主要由微控制器AT89C51、獨立CAN控制器SJA1000、CAN收發器82C250、高速光耦6N137、撥碼開關地址輸入電路、電源監測與看門狗電路以及面向伺服電機的部分電路組成。
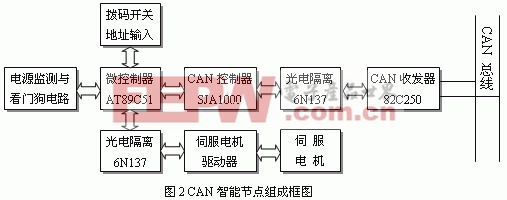
由于采用了模塊化的伺服電機驅動器,各控制節點只需實現簡單的伺服控制功能,故采用Atmel公司的8位單片機AT89C51作為微控制器。CAN控制芯片完成CAN的通信協議,主要由實現CAN總線協議的部分與實現與微控制器接口部分的電路組成,這里采用的是PHILIPS公司的SJA1000。它是一種獨立CAN控制器,具有BasicCAN和PeliCAN兩種工作模式,其中PeliCAN模式支持具有很多新特性的CAN2.0B協議。82C250是高性能的CAN總線收發器,是CAN協議控制器和物理總線的接口,它對總線提供差動發送能力,對CAN控制器提供差動接收能力。通過對82C250的8號管腳的不同設置,可使其工作于高速、待機、斜率等三種模式。
撥碼開關地址輸入電路用于對各個CAN節點的標識。上電后,單片機首先讀取撥碼開關的數值,并在CAN初始化中將其寫入SJA1000的接收代碼寄存器,作為該節點的標識碼。電源監測與看門狗電路采用的是MAX813,它在系統上電時刻提供上電復位功能,在程序運行時提供看門狗監測和電源監測功能,并能夠實現手動復位。

伺服電機相關文章:伺服電機工作原理










評論