通信協(xié)議 文章 最新資訊
采用ARM+Linux架構(gòu)的基于CAN總線和MiniGUI的虛擬儀表設(shè)計
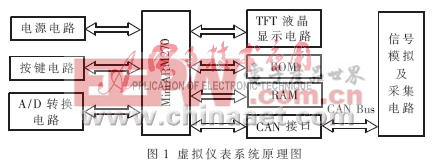
- 采用ARM+Linux架構(gòu)的基于CAN總線和MiniGUI的虛擬儀表設(shè)計,基于ARM+Linux的架構(gòu),通過CAN總線獲得數(shù)據(jù),再利用嵌入式系統(tǒng)平臺的構(gòu)建思想,實現(xiàn)了在嵌入式Linux操作系統(tǒng)下,基于ARM和 MiniGUI環(huán)境的車載信息的圖形化顯示。介紹了虛擬儀表系統(tǒng)的體系結(jié)構(gòu)、數(shù)據(jù)采集節(jié)點的構(gòu)成及Linux環(huán)境下CAN總線驅(qū)動程序的實現(xiàn)。
- 關(guān)鍵字: MiniGUI 虛擬 儀表 設(shè)計 總線 CAN ARM Linux 架構(gòu) 基于 通信協(xié)議
基于SPCE061A處理器醫(yī)療模型人訓練系統(tǒng)設(shè)計
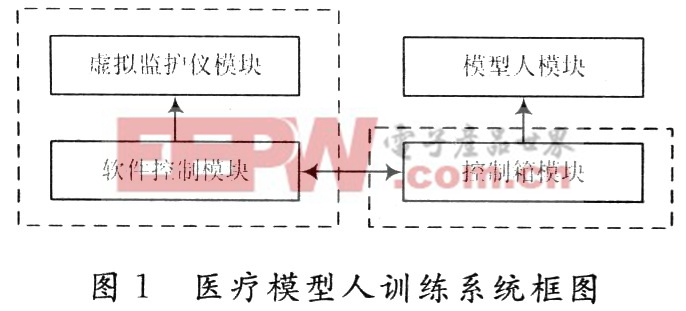
- 醫(yī)療模型人訓練系統(tǒng)是現(xiàn)代電腦技術(shù)與模擬技術(shù)相結(jié)合的一種交互式醫(yī)學模擬教學產(chǎn)品,是集教學、培訓、考核和實際操作于一體,知識全面、功能強大的計算機交互式模型人訓練系統(tǒng)。該系統(tǒng)的下位機硬件采用凌陽16位單片機SPCE061A處理器用來采集模型人的生命體征參數(shù)以及控制模擬模型人的生理過程,上位機軟件系統(tǒng)采用雙屏顯示的形式實現(xiàn)了控制模擬模型人的生理過程和監(jiān)視模擬模型人的生命體征參數(shù)。該系統(tǒng)實現(xiàn)了在安全、受保護的超真實模擬環(huán)境里進行醫(yī)學教學和訓練。
- 關(guān)鍵字: 訓練 系統(tǒng) 設(shè)計 模型 醫(yī)療 SPCE061A 處理器 基于 通信協(xié)議
基于nRF2401的PLC無線通信控制器

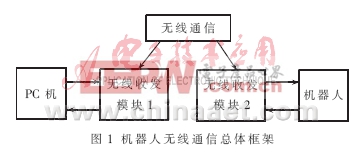
- 介紹一種利用nRF2401無線通信模塊實現(xiàn)PLC間數(shù)據(jù)無線傳輸?shù)姆椒ǎ墒股a(chǎn)現(xiàn)場的PLC靈活布置,并節(jié)省布線成本。該系統(tǒng)設(shè)計是針對西門子S7-200PLC,單片機從PLC獲取現(xiàn)場數(shù)據(jù),再將數(shù)據(jù)傳輸?shù)絥RF240l以實現(xiàn)無線通信,由此實現(xiàn)PLC之間的無線數(shù)據(jù)傳輸。經(jīng)試驗表明:該無線通信控制器可在9 m范圍實現(xiàn)PLC間數(shù)據(jù)的無線傳輸。
- 關(guān)鍵字: 控制器 無線通信 PLC nRF2401 基于 通信協(xié)議
基于TMS320F2812的智能變送器
- 針對工業(yè)應(yīng)用中使用傳感器測量參數(shù),傳感器信號較弱,不適合遠距離傳輸,且非線性效果不理想,迭不到較高精度要求的問題,提出一種基于TMS320F2812的智能變送器設(shè)計方案。該設(shè)計以32位TMS320F2812為核心控制器,采用MAXl400進行A/D轉(zhuǎn)換,再將測量數(shù)據(jù)進行初步處理后利用TMS320F2812內(nèi)部集成的eCAN模塊與上位機進行通信。結(jié)果表明:該智能變送器的變送精度實際接近0.05級,總功耗控制在4 mA以內(nèi)。
- 關(guān)鍵字: 變送器 智能 TMS320F2812 基于 通信協(xié)議
基于ARM的電子負載網(wǎng)絡(luò)監(jiān)控系統(tǒng)
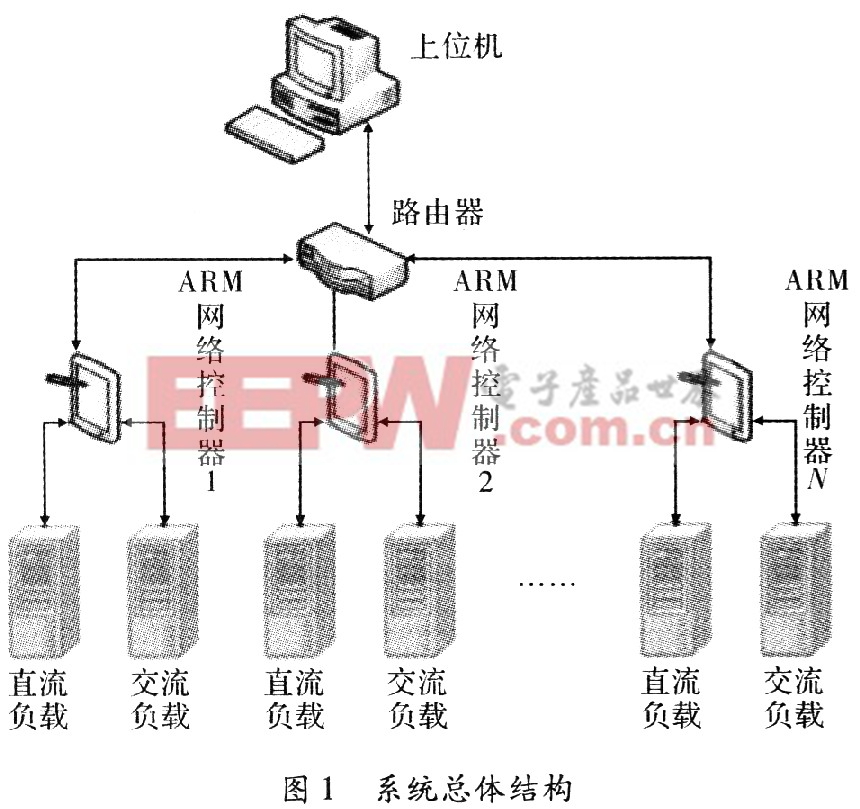
- 基于ARM的電子負載網(wǎng)絡(luò)監(jiān)控系統(tǒng),設(shè)計了一種基于ARM的電子負載網(wǎng)絡(luò)監(jiān)控系統(tǒng)。給出了以三星S3C2440為核心的嵌入式系統(tǒng)硬件結(jié)構(gòu)和組成,以Windows CE作為嵌入式系統(tǒng)軟件平臺,采用Embedded VC++開發(fā)了可視化的通訊控制軟件,實現(xiàn)了RS232總線與以太網(wǎng)的互聯(lián)。上位機采用Delphi作為開發(fā)工具設(shè)計了電子負載監(jiān)控軟件,實現(xiàn)了遠程監(jiān)控,多負載控制,數(shù)據(jù)采集分析等功能。
- 關(guān)鍵字: 網(wǎng)絡(luò) 監(jiān)控系統(tǒng) 負載 電子 ARM 基于 通信協(xié)議
基于L2觸發(fā)的異構(gòu)網(wǎng)絡(luò)切換研究
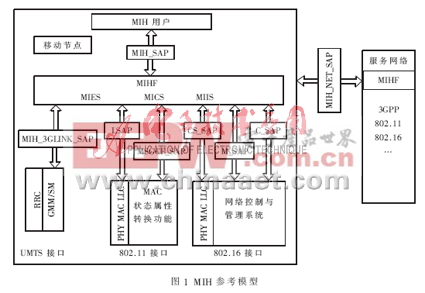
- IETF提議的MIPv6協(xié)議能夠?qū)崿F(xiàn)異構(gòu)網(wǎng)絡(luò)切換,但切換時延和丟包率較大,其擴展協(xié)議FMIPv6為此提出L2觸發(fā)的概念,卻未定義L2觸發(fā)的具體時間。因此,結(jié)合IEEE 802.21媒體獨立切換(MIH)協(xié)議提出一種基于L2觸發(fā)的異構(gòu)網(wǎng)絡(luò)切換方案,通過NS-2仿真驗證了L2觸發(fā)的切換方案能有效減少切換時延和丟包,并評價了不同速度、不同預測系數(shù)對切換期間的中斷概率、丟包率和網(wǎng)絡(luò)使用率的影響。
- 關(guān)鍵字: 切換 研究 網(wǎng)絡(luò) 觸發(fā) L2 基于 通信協(xié)議
基于SIM300C的遠程數(shù)據(jù)采集傳輸終端設(shè)計
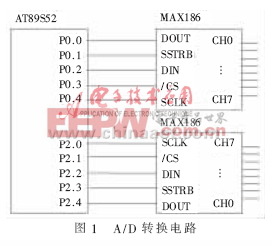
- 基于SIM300C的遠程數(shù)據(jù)采集傳輸終端設(shè)計, 提出一種由GPRS模塊SIM300C和單片機AT89S52組成的遠程數(shù)據(jù)采集和傳輸終端,介紹了系統(tǒng)的硬軟件設(shè)計。該系統(tǒng)以單片機為主控制器,配合A/D轉(zhuǎn)換電路、SIM300C模塊及其外圍電路,將傳感器端采集的模擬電壓或電流信號進行A/D轉(zhuǎn)換,由單片機將相應(yīng)的數(shù)字量打包,通過串口發(fā)送給SIM300C模塊,SIM300C模塊自動將要發(fā)送的數(shù)據(jù)打包成TCP/IP數(shù)據(jù)包,經(jīng)GPRS無線通信網(wǎng)絡(luò)發(fā)送給遠端的服務(wù)器。實驗結(jié)果表明,該系統(tǒng)運行穩(wěn)定可靠、數(shù)據(jù)傳輸及時高效。
- 關(guān)鍵字: 終端 設(shè)計 傳輸 數(shù)據(jù)采集 SIM300C 遠程 基于 通信協(xié)議

基于Infineon單片機的CAN網(wǎng)關(guān)研究
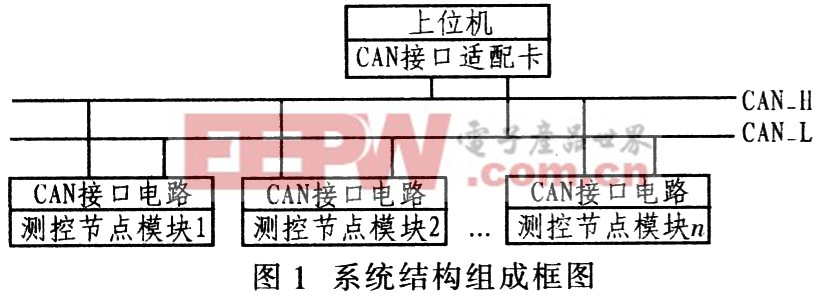
- 采用Infineon XC2000系列單片機實現(xiàn)CAN網(wǎng)關(guān)模塊,利用MFC編寫PC端網(wǎng)關(guān)配置軟件。該系列單片機MultiCAN模塊可實現(xiàn)不同速率的獨立CAN網(wǎng)絡(luò)之間的數(shù)據(jù)接收、存儲、轉(zhuǎn)發(fā);能夠過濾不需要的CAN消息,降低子網(wǎng)的負荷。該網(wǎng)關(guān)模塊可以實現(xiàn)改變CAN網(wǎng)絡(luò)拓撲結(jié)構(gòu)、延長網(wǎng)絡(luò)通信距離、增加節(jié)點數(shù)目等功能。
- 關(guān)鍵字: 網(wǎng)關(guān) 研究 CAN 單片機 Infineon 基于 通信協(xié)議

通信協(xié)議介紹
您好,目前還沒有人創(chuàng)建詞條通信協(xié)議!
歡迎您創(chuàng)建該詞條,闡述對通信協(xié)議的理解,并與今后在此搜索通信協(xié)議的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對通信協(xié)議的理解,并與今后在此搜索通信協(xié)議的朋友們分享。 創(chuàng)建詞條
通信協(xié)議相關(guān)帖子
通信協(xié)議資料下載
通信協(xié)議專欄文章
相關(guān)主題
熱門主題
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司