- 摘 要:本文介紹了應用于磁軸承的雙DSP熱備容錯控制方案,該方案采用時鐘同步技術,由總線表決模塊實現系統的容錯處理,硬件判決模塊實現硬件故障判斷。由中心仲裁模塊根據兩判決模塊的結果進行復雜的仲裁,并完成切換和完善的報警邏輯,從而提高了磁軸承控制系統的可靠性。關鍵詞:容錯;磁軸承; 控制器; CPLD; DSP引言電磁軸承(AMB)是利用可控電磁吸力將轉子懸浮起來的一種新型高性能軸承,具有無接觸、無摩擦、高速度、高精度、不需潤滑和密封等一系列特點,在交通、超高速超精密加工
- 關鍵字:
CPLD DSP 磁軸承 控制器 容錯
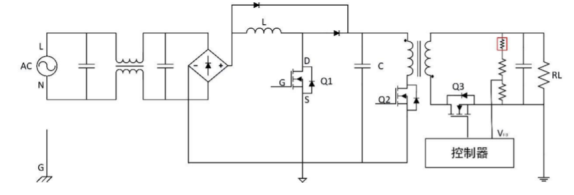
- 上海貝嶺生產的專利電子鎮流器控制器BL8301可為電子鎮流器半橋LC諧振逆變器提供所有必需的控制和保護功能,可用于設計80W以下中高端熒光燈交流電子鎮流器。文中介紹了BL8301的基本結構特點和功能原理,
- 關鍵字:
BL8301 及其 應用 控制器 鎮流器 專利 電子 新型
- 介紹了一種采用DSP芯片TMS320LF2407A實現永磁同步電機磁場定向控制器的控制原理,給出了采用磁場定向控制策略來設計該控制器的硬件組成結構及軟件設計流程。
- 關鍵字:
定向 控制器 設計 磁場 電機 DSP 永磁 同步 PMSM
- 論述數字路燈照明系統中組群控制器的功能,給出基于雙微處理器的組群控制器核心電路設計方案與實現方法
- 關鍵字:
設計 實現 控制器 系統 照明 路燈
- 摘 要:本文對一種適合于機器人控制的多軸控制器的總體結構和相關知識進行了介紹,并給出了控制器的詳細設計方案和工作流程。該控制器選用DSP為主處理器,采用電壓反饋的形式,可應用于其它類似的控制機構中。關鍵詞:DSP;機器人;控制器;CAN總線引言對于機器人控制技術,實時性和穩定性是研究的重點。現階段,機器人控制的主要方法是在離線狀態下對步態進行規劃,并在主控機上對機器人的運動進行實時的補償,這種處理方法對處理器的運算速度和處理能力提出了很高的要求。傳統的機器人控制器大多以
- 關鍵字:
CAN總線 DSP 機器人 控制器
- ARM微控制器LPC210X的LCD接口技術,本文分別以GPI0口直接連接、串行轉換連接、CPLD分部連接三種方法闡述了無外部總線的Philips ARM微控制器LPC210X與點陣圖形液晶顯示器的接口設計,并給出硬件電路框圖和主要程序。
- 關鍵字:
接口 技術 LCD LPC210X 控制器 ARM
- MPC555微控制器與汽車電子,介紹32位微控制器MPC555及其應用開發系統的技術特點。
- 關鍵字:
汽車電子 控制器 MPC555
- 基于嵌入式Linux的BACnet控制器軟件設計,描述BACnet協議的體系結構,分析BACnet控制器的功能,論證基于嵌入式Linux開發BACnet控制器的可行性。
- 關鍵字:
軟件 設計 控制器 BACnet 嵌入式 Linux 基于
- 如何給PCI卡選用合適的總線控制器,本文分析在檢測設備中設計PCI總線接口卡時如何選擇適合的PCI控制器。
- 關鍵字:
總線 控制器 合適 選用 PCI 如何
控制器介紹
控制器是整個可視電話系統的控制核心。在系統啟動時,它負責初始化系統中的各軟硬件模塊。舉例說明:當調制解調器開始數據傳輸后,主控制模塊初始化各內部變量,然后通過通信口向對方送 16 個同步標記以及 H.245 的各種消息,完成能力交換、主從決定等,最后打開語音、視頻通道,初始化結束,正式通信開始。在通信過程中,主控制模塊維護其他各軟、硬件模塊的正常。其工作過程一般如下:終端A電源接通后,控制器首先從 [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473