面陣CMOS圖像傳感器LUPA4000的驅動設計

隨著CMOS集成電路工藝的不斷發展和完善,CMOS圖像傳感器發展非常迅速。CMOS圖像傳感器具有低成本、簡單的數字接口、運行簡易、高速率可以實現智能處理功能等特點而得到廣泛應用;又因其具有噪聲低、功耗小、動態范圍寬、光譜靈敏度高、超微型化、數字化以及易實現商品化等特點,特別是他將圖像傳感器陣列、時序控制電路、信號處理電路、A/D轉換器以及接口電路等集成于一體,真正實現了單芯片成像,LUPA4000是一款典型的大面陣宇航級的CMOS圖像傳感器,本文主要描述在本設計中所做的兩項主要的工作:在軟件上利用VHDL語言描述圖像傳感器LUPA4000的驅動時序的思想以及在硬件上設計其外圍電路的方法。
本文引用地址:http://www.104case.com/article/89969.htm1 LUPA4000圖像傳感器
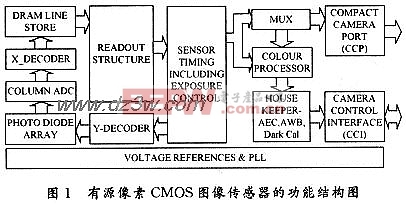
LUPA4000是Cypress公司生產的一款400萬像素的CMOS面陣圖像傳感器,憑借著其在讀出速度快(66 M/s)、功耗低(不高于200 mW)、空間應用的可靠性好(能夠在強輻射環境中工作)等方面的優勢,LUPA4000主要用于天文觀測等領域中發揮著其絕對的優勢;此外,他還廣泛應用于機器視覺以及醫療影像中。在不開窗口的情況下速度可以達到15 f/s;片上集成了2塊A/D轉換器用來提高像素的讀出速度是其又一顯著特點;同時,LUPA4000又提供了開窗口模式用以提高讀出的速度,所謂開窗口模式是指LUPA4000可以通過對SPI(SPI下文有介紹)可編程特性任意改變他的讀出陣列大小。在特定情況下LUPA4000的另一個優越性體現在他可以進行雙斜率積分實現對第一次積分的補償;美中不足的是LUPA4000是一款單色的傳感器芯片。這里用圖1來說明他的工作原理:
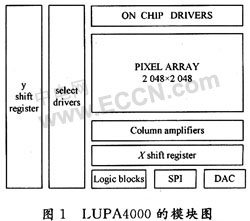
從圖1上可以看到,LUPA4000主要有以下幾個部分組成:一個像素陣列單元、X方向尋址寄存器以及2個Y方向的尋址寄存器(圖上畫了1個)、SPI(Serial-Parallel-Interface)列信號放大器等。采用同步快門工作模式,其具體的工作流程主要分為3個步驟:
(1)在圖像傳感器工作之前,首先應上載SPI;SPI俗稱內部寄存器,他決定了圖像傳感器的讀出方向以及是否進行開窗口讀出等;上載結束之后,會輸出一個eos_spi信號意味著寄存器上載完成。
(2)上載結束之后,圖像傳感器就可以正常工作。當圖像傳感器接受到外界的光信號之后,光積分區域便由reset,mem_hl,precharge,sample四個信號控制,實現光電轉換,然后把電信號儲存到每個像素單元里;
(3)積分結束之后,就進行信號的處理與讀出,這是工作最重要的部分,這些環節由sync_y,clock_y,no-rowsel,pre_co,sh_co,sync_x,clock_x控制。
sync_y信號高電平的到來意味著1幀圖像開始讀出;clock_y信號為高電平時則意味著1行像素開始讀出。當1行像素讀出時,會有1個行開頭時間(ROT),由no-rowsel,pre_co,sh_co三個信號來控制,這個時間時為了確保輸出數據的穩定性,原則上說,ROT越短越好;然后sync_x為高電平的時候,開始行讀出,行讀出由信號clock_x控制,clock_x時一個66 MHz的周期信號,每個周期讀出2個像素;如此反復,當讀完最后一行的時候,會輸出一個eos_y信號,意味著1幀讀出的結束。這就構成了一個循環。
2 時序的設計
根據上面的敘述,就可以清楚LUPA4000的基本工作原理。在具體的時序設計過程中,采用自頂向下(top-down)的設計方法,產生這些數字信號。所謂自頂向下的設計是從系統級開始,把系統劃分為若干個基本單元,然后再把每個基本單元劃分為下一層次的基本單元,直到可以直接用基本元件實現為止。自頂向下的設計方法方便從系統級劃分和管理整個項目,使得復雜數字電路的設計成為可能,并且可以減少設計人員,避免不必要的重復設計。
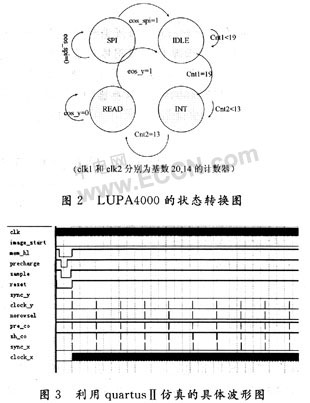
為了能讓其正常工作,需用1塊CPLD或者FPGA,通過VHDL語言產生出上述所需要的信號,然后將其送給LUPA4000。可以根據上述所分析的LUPA4000工作的3個階段,通過有限狀態機(state machine)產生具體的信號。狀態機是由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作、完成特定操作的控制中心,屬于一種時序邏輯電路。通常狀態機由3部分組成:當前狀態寄存器、下一狀態組合邏輯、輸出組合邏輯。LUPA4000的具體狀態轉換如圖2所示。
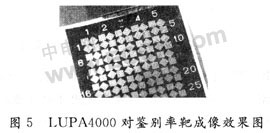
由于LUPA4000所需要的資源不大,故本設計采用1塊Altera公司的MAXⅡ系列EPM1270T144C5。本設計使用VHDL語言編寫程序代碼,利用Altera公司的配套軟件QuartusⅡ進行仿真,其具體的仿真結果如圖3所示。
其中clk為輸入信號,由有源晶振提供;mem_hl,precharge,reset,sample為CPLD輸出給LUPA4000的積分信號;sync_y,clock_y,norowsel,re_co,h_co,sync_x,clock_x為讀出控制信號。從圖3上可以看出,利用狀態機來描述時序最顯著的特點是:可以避免產生一些毛刺現象。根據手冊以及對相關重要信號進行測試分析可以得到,仿真的結果能夠滿足LUPA4000的信號特性。
3 pcb的設計以及硬件的實現
在系統電路設計中,考慮到小型化,功耗以及升級性和兼容性方面的要求,采用2塊電路板通過統一標準接口對接,控制傳輸板用USB接口與主機連接,采用LDO以及JTAG接口+FPGA作為主要的控制單元的方案。
整個系統按功能和組成分成2個部分,分別制備成2塊4層的PCB板。第一部分是前端成像部分,CMOS圖像傳感器和LDO電源組成,以CMOS圖像傳感器為核心,加上外圍的電阻和電容,以及2個PC104接口,構成前端的電路板;第二部分是后端的時序控制和USB數據采集部分,包括CPLD,JTAG接口和LDO電源和USB傳輸芯片,構成后端的電路板。這一部分通過PC104接口和與前端相連,輸出CMOS圖像傳感器的控制時序以及USB芯片數據采集的同步時序,進行數據的傳輸;2個電路板用Protel平臺來搭建電路。
按上述方案設計的系統具有以下性能特點:
(1)圖像傳感器與電源等器件隔離,受干擾較小,保證了成像質量;
(2)采用前后分離的2塊PCB設計,在不改變前端成像部分的情況下可以適當調整控制電路的設計,具有很大的靈活性;
(3)采用低成本,高性能的CPLD作為控制部分的核心,降低了設計的成本;
(4)選擇低壓差穩壓器(Low DropOUT Regulator,LDO)作為供電模塊,保證了系統工作的穩定性。其具體的硬件連接圖如圖4所示。

4 結 語
本設計將傳統設計方法和基于芯片的設計方法相結合,采用集成電路及復雜可編程邏輯器件(CPLD)共同實現系統功能,使系統具有集成度高、可靠性好、靈活性強、設計調試方便等特點。本系統用2塊電路板完成整體系統的構建,一塊用于驅動和控制CMOS圖像傳感器,以采集連續視頻圖像;另一塊相當于一塊USB數據采集卡,將前者采集的圖像數據,傳輸入PC機。這樣的設計使得整個系統便于調試,并且接口部分的設計充分考慮了可擴展可更換的要求,便于連接新的模塊。
總的來說,該設計包括軟件和硬件能夠很好的滿足LUPA4000的成像需要,實現了對LUPA4000成像系統的一定的開發。從圖5可以看到,圖像清晰穩定、噪點小,CMOS圖像傳感器很好的滿足了成像的需要。




評論