集體食堂全自動打飯系統設計

近年來,各類院校、企事業單位的公共食堂已基本實現了規范化和網絡化,CAN總線、POS窗口機等的應用,極大提高了工作效率,增強了售飯管理系統的可靠性、實時性和靈活性。但這些系統采用的是傳統的管理人員手工打飯方式,存在很多弊端,例如:
本文引用地址:http://www.104case.com/article/89789.htm(1)不能準確定量。人工打飯的飯量主要靠經驗,不可能次次稱重。員工所打飯量多于消費者要求量,食堂虧損;少于消費者要求量,消費者意見大,影響服務質量。
(2)浪費大量人力財力。打飯高峰期,一個員工要在一個小時左右的時間打幾百甚至上千碗飯,工作量繁重,同時打飯員工的增多必然導致財力支出的增加。
(3)打飯效率低。有些員工經驗不足,或是打飯速度不快,很容易造成消費者不滿,排列隊伍過長,食堂過分擁擠等現象。因此,在不改變現有食堂刷卡系統的條件下,研制開發出一套能實現真正“智能化”的全自動打飯系統具有十分重要的意義。
1 系統模型
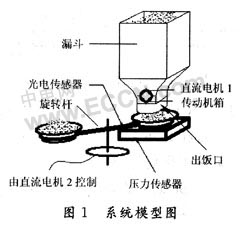
此系統主要是由機械和電子控制2大部分組成。機械部分由直流減速電機、漏斗、支撐架、旋轉桿等組成,控制部分由單片機、鍵盤、壓力傳感器、光電傳感器、液晶顯示等組成,如圖1所示。當消費者通過鍵盤輸入所需打飯飯量時,單片機控制液晶顯示屏工作,顯示具體飯量及消費金額,同時啟動前端刷卡系統。在消費者刷卡并扣除當前所需消費金額后,單片機首先控制相關直流電機(電機2),使傳遞機構旋轉180°,并通過光電傳感器精確定位,將空碗送到打飯口下,然后控制另一電機(電機1)轉動,出飯口向碗里輸送米飯。當碗里的米飯的重量達到檢測輸入值時,電機1停轉,電機2旋轉180°把米飯送出去同時送入空碗,如此循環。
2 系統硬件設計
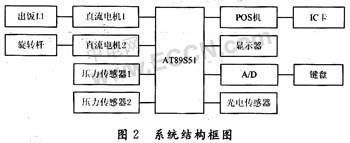
整個自動打飯系統的核心是單片機,采用8位微控制器AT89S51。此芯片在數據處理、邏輯分析等方面具有強大的優勢,可以充分利用這一優勢設計融合數據采集、模數轉換、數據分析處理、直流電機控制、液晶顯示等于一體的系統裝置,完成出飯口排出米飯,傳遞飯碗以及實時顯示等功能。結構框圖如圖2所示。
2.1 電機驅動模塊
采用PWM方法,調節加在電機兩端的平均電壓,實現對直流電機的控制。但由單片機產生的PWM信號不足以直接驅動電機,需用驅動器將其轉換成可驅動電機的驅動信號,如圖3所示。驅動電路采用SOTS公司的專用電機驅動芯片L298N。他是恒壓恒流雙H橋電機驅動器,驅動能力強,可同時控制2臺直流電機,輸出電流可達到2 A。單片機通過控制L298N的使能端控制電機的啟動和停止。當使能端為低電平時,電機停止;當使能端為高電平時,電機啟動。通過控制使能端的脈沖寬度,而達到調整直流電機轉速的目的。
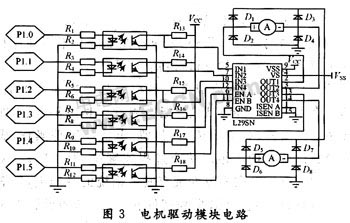
在實際應用中,為了保護電機,在驅動電路中加入了兩組穩流二極管,且使供電電壓VS大于其邏輯電壓VSS,避免了電機失控現象。另外,為了抑制電機的大電流對單片機程序的沖擊,系統中采用了光電耦合器實現隔離。該驅動電路結構簡單,性能可靠。
2.2 旋轉桿的控制設計
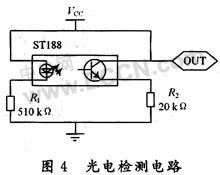
雖然單片機可以控制直流電機的減速,但直流電機在具體運行中仍存在一定慣性。為了能夠使旋轉桿送入的空碗正對著出飯口,此系統在旋轉桿底部增加了發射取樣式紅外線對管ST188作為尋點傳感器,圖4為光電檢測電路。ST188采用高發射功率紅外光電二極管和高靈敏度光電晶體管組成,以非接觸檢測方式,檢測距離可調整達2~10 mm。當旋轉桿旋轉時,保持發光管發光,當其下方為出飯口準確位置點標志時,其接受管輸出為高電平。這樣,控制系統就可以分析出當前空碗的位置,從而達到調整旋轉桿運行狀態的目的。
2.3 飯量稱重設計
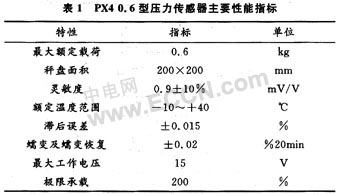
出飯口排出的米飯重量由稱重控制系統完成,其稱重范圍為0~500 g。本系統中選用PX4 0.6型單點式稱重傳感器完成電子稱重功能。此傳感器為電阻應變式壓力傳感器,結構簡單小巧,安裝簡單,且經過角差預調整,可以滿足系統要求。其主要性能指標見表1。
傳感器檢測平臺上飯碗及其內部米飯的重量,據此控制米飯加注過程的進行,表達式為:
![]()
其中,W表示已加注米飯重量,W0表示空碗重量,W1表示當前碗內米飯重量,W2表示加注前碗內米飯重量。
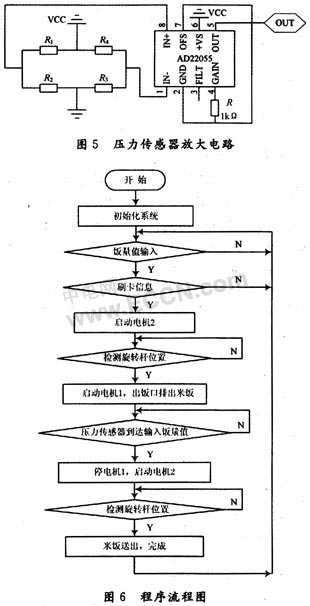
傳感器輸出電壓為毫伏數量級,需要進行信號放大,如圖5所示。圖中利用電橋作為重量壓力的測量電路,R1,R2,R3,R4作為電橋的4個橋臂,為阻值變化與外界受力相關的應變電阻,測量電橋由VCC供電。在空載時,電橋輸出電壓為:
![]()
當VCC=0 V時,電橋處于平衡狀態,則電橋對運算放大器的輸出為0。當稱重壓力變化時,RS將隨壓力變化而變化。這時電橋失去平衡,對放大器有不平衡電壓輸出。電橋的輸出電壓由AD22055檢測放大后輸出,放大倍數設定為50。
3 系統軟件設計
系統的軟件設計采用模塊化設計方法,先設計出子程序并進行調試,然后進行模塊集成,形成主程序。從實現功能方面考慮,子程序包括旋轉桿位置監控、電機控制、鍵盤管理、稱重檢測以及顯示管理等。具體程序流程圖如圖6所示。在設計程序時,除了盡量多采用單字節指令,避免“亂飛”程序以外,還建立了“看門狗”,利用系統的安全保護特性來處理“死循環”程序。
4 測試結果
4.1 運行時間
驅動電壓為12 V時,直流電機1每分鐘轉100次,直流電機2每分鐘轉60次,由于系統采用的是PWM方法,加在電機兩端的平均電壓略低于12 V。經PC396電子秒表測試,旋轉桿旋轉180°所需的時間為0.8 s。
據統計,85%的消費者所打飯量為100 g或150 g,故只需對這2種消費情況進行測試。測試結果顯示,此系統出飯口排出米飯量100 g平均所需時間為2.85 s,排出米飯量150 g平均所需時間為3.63 s。這樣,從消費者輸入飯量值開始,直至系統將盛好米飯的碗送出,整個過程平均所需時間分別為6.50~7.80 s。可見,系統運行速度快,大大提高了售飯效率。
4.2 稱重精度
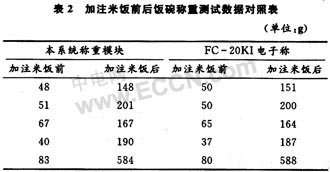
將飯碗在加注米飯前后的重量用本系統稱重裝置和FC-20KI精密數字電子稱進行比對測試,其測試結果表2所示。
從表2中可以看出,米飯重量測量精度小于±5 g,靠性高。
5 結語
針對目前集體食堂中傳統手工打飯方式存在的種弊端,本文首次設計出一套全自動打飯系統,并已經制模型。系統具有2大特點:
(1)設計獨特:除了利用鍵盤和顯示器實現直觀、透明的人機對話形式以外,系統還在機械結構上進行了精心設計,如巧用電機和旋轉桿,并針對米飯的柔軟性和粘性,設計了直流電機控制翻轉型的齒輪完成米飯的排停,避免了米飯出口的堵塞。另外,系統控制部分與米飯加注和輸送裝置是分開布局的,所以清潔、衛生。
(2)操作智能:消費者只需在鍵盤上輸入打飯飯量,拿卡在POS機上輕輕劃過,把空碗擱在相應平臺上,即可在短暫的時間內,完成讀值、扣費、電機控制等操作,成功取得自己所需的米飯。整個過程速度快、控制準確、無需借助他人幫忙。在不改變現有刷卡系統的基礎上,完全實現了管理規范化、有效化和智能化,為食堂的后勤管理節約了人力和財力開支。
經過反復試驗,系統模型完全能夠滿足集體食堂的需要。其設計成本低、性能穩定、可靠性高、操作簡單便捷,適用于高等院校、大型企事業等單位的集體食堂,為打造一流的膳食管理提供了有力保障,具有極其廣闊的市場前景。

pos機相關文章:pos機原理
稱重傳感器相關文章:稱重傳感器原理
評論