并行頻域OCT圖像預(yù)處理系統(tǒng)的DSP硬件平臺設(shè)計與實現(xiàn)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
·FLASH電路
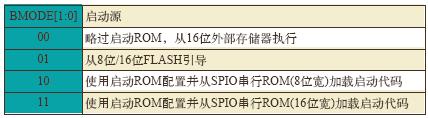
BF561具有4種外部存儲器的自主引導(dǎo)方式,如表1所示。本系統(tǒng)選用第二種方式,從16位FLASH進行自主引導(dǎo)。BF561 具有的異步存儲控制器可以通過編程與多達4個BANK的FLASH連接,每個BANK的容量最多可達64MB。FLASH選擇1MB容量的AM29LV800D。設(shè)定在BF561異步存儲空間的BANK0上,地址范圍為0x20000000~0x20100000。
表1 引導(dǎo)模式設(shè)定
視頻采集解碼電路
視頻采集解碼電路包括攝像機和視頻解碼電路。攝像機選用敏通公司的MTV-13V5H黑白攝像機,具有44萬有效像素,光譜響應(yīng)范圍為500nm~1100nm,PAL制式視頻輸出,速度為25fps。
視頻解碼芯片選用集成了10位ADC的增強型視頻解碼器ADV7183,它能夠?qū)z像機輸出的PAL制模擬視頻基帶信號轉(zhuǎn)換成16位 ITU-R 656的YUV型4:2:2視頻數(shù)據(jù),實現(xiàn)對輸入模擬視頻信號的亮度色度分離、采樣。BF561與ADV7183的接口電路如圖4所示:BF561將ADV7183輸出的8位亮度信息通過PPI0口輸入。PF0口與PF1口分別為I2C接口的串行時鐘和串行數(shù)據(jù)接口。PF2口與PF13口分別為控制使能和重置ADV7183的端口,PPI1 SYNC1口與PPI1 SYNC2口分別為YUV像素數(shù)據(jù)的行同步信號和垂直同步信號的輸入端口。
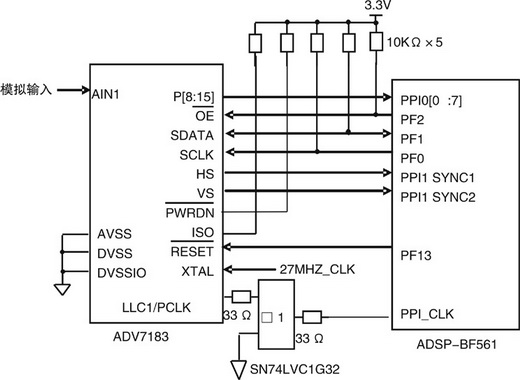
圖4 BF561與ADV7183的接口電路
視頻編碼顯示電路
視頻編碼顯示電路由視頻編碼芯片和顯示器組成。視頻編碼芯片選用集成了10位高品質(zhì)視頻DAC的ADV7179,它可將兼容ITU-656標準的8/16位YCrCb型4:2:2數(shù)字視頻數(shù)據(jù)轉(zhuǎn)換成兼容國際標準的NTSC、PAL等制式的模擬視頻信號。本系統(tǒng)選用DAC_B作為輸出口,將BF561輸出的經(jīng)過處理的8位灰度信號轉(zhuǎn)化為PAL制式視頻信號輸出至顯示器上顯示。BF561與ADV7179的接口電路如圖5所示:PPI1口為8位灰度信息輸出口,PF0口與PF1口分別為IC接口的串行時鐘和串行數(shù)據(jù)端口。PF14口為控制重置ADV7179的端口。PPI0 SYNC1控制YUV像素數(shù)據(jù)的行同步信號,PPI0 SYNC1控制YUV像素數(shù)據(jù)的垂直同步信號。
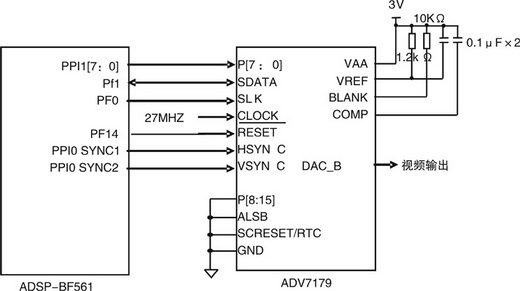
圖5 BF561與ADSP7179的接口電路
視頻輸入同步控制
系統(tǒng)視頻輸入同步的控制通過BF561查詢PPI口狀態(tài)寄存器的FT_ERR位實現(xiàn),從而省略了BF561對攝像機的控制電路。FT_ERR位為ITU-R656視頻軌跡錯誤標志位,根據(jù)PPI0口輸入視頻信號中的控制字判斷是否同步而進行清零或置位。圖6所示為ITU-R656 視頻數(shù)據(jù)輸入的三種模式:① 整場模式:包括活動視頻、控制字節(jié)序列和輔助數(shù)據(jù);② 活動視頻模式:只包含活動視頻信號信息;③ VBI模式:只包括控制字節(jié)序列和輔助數(shù)據(jù)。其中①與③輸入模式影響FT_ERR標志位,可用于視頻輸入同步的判斷。
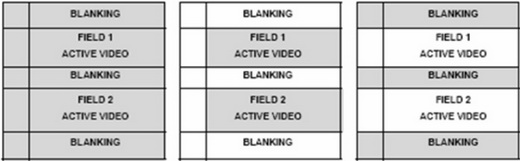
① 整場模式 ②活動視頻模式 ③VBI模式
圖6 ITU-R656 視頻數(shù)據(jù)的三種輸入模式
系統(tǒng)開始以VBI模式輸入用于BF561與攝像機同步的判斷及調(diào)整,當實現(xiàn)視頻同步后通過活動視頻模式輸入系統(tǒng)需要的視頻信息。初始化程序如下:
InitVBI_PPI0(); //VBI模式輸入初始化
Enable_PPI0(); // PPI0口輸入允許
if (*pPPI0_STATUS & FT_ERR) //
判斷幀軌跡錯誤
{*pPPI0_STATUS &= ~FT_ERR; //
清幀軌跡錯誤標志
Disable_PPI0(); // PPI0口輸入禁止
InitVBI _PPI0(); //VBI模式輸入初始化
Enable_PPI0(); // PPI0口輸入允許
}
Disable_PPI0(); //PPI0口輸入禁止
Init_PPI0(); //活動視頻模式輸入
初始化
Enable_PPI0(); // PPI0口輸入允許
結(jié)語
本文設(shè)計了基于ADSP-BF561的并行頻域OCT圖像預(yù)處理系統(tǒng)硬件平臺。對通過該硬件平臺開發(fā)出的并行頻域OCT圖像預(yù)處理系統(tǒng)進行實驗,處理一幀圖像的時間約為9 ms,而同樣的圖像在CPU為Inter 2.4GHz的計算機上進行處理需要時間為43ms,故該系統(tǒng)提高了處理速度。而且圖像分辨率與精度都滿足設(shè)計要求,且實現(xiàn)了系統(tǒng)的小型化。證明該方案可行,是對并行頻域OCT成像理想的硬件平臺。
參考文獻:
1. Tomlins P H, Wang R K Theory, Developments and applications of optical coherence tomography [J]. Journal of Physics D: Applied Physics, 2005,38 (15) :2519 - 2535 .
2. 吳開杰、李剛,OCT系統(tǒng)對單層散射組織的有效探測深度,天津大學(xué)學(xué)報,2005,38(8):706-710.
3. 李剛、任釗、吳開杰等,Parallel spectral-domain optical coherence tomography for non-scattering object imaging,天津大學(xué)學(xué)報(英),2007, 13(2), 107-112.
4. 李剛、任釗、林凌等,高速線掃描OCT的可行性與光學(xué)成像特性的研究,中國生物醫(yī)學(xué)工程學(xué)報,2007,26(1):89-93.
5. 馬振鶴、王瑞康、張帆等,快速高分辨率的頻譜光學(xué)相干層析成像系統(tǒng)研究,納米技術(shù)與精密工程,2005,3(3):232-235.
6. 鄭羽、李剛、任釗等,基于全量程的復(fù)譜頻域OCT系統(tǒng),天津大學(xué)學(xué)報,2006,10(19):1247-1251.
7. ADSP-BF561 Blackfin Processor Hardware Reference,AD Inc.,2007.
8. 陳峰,Blackfin系列DSP原理與系統(tǒng)設(shè)計,電子工業(yè)出版社,2004










評論