基于中值的圖像椒鹽噪聲的非迭代濾除

1 引 言
濾去圖像中的噪聲同時保持其中的細節(jié)是圖像處理中的一個重要內(nèi)容。現(xiàn)實中由于照相機的性能和光線強弱的變化,噪聲在圖像中不可避免。去除噪聲的方法大致分為兩類:線性方法和非線性方法。線性濾波和含噪圖像的卷積能有效地去除高斯噪聲以及其他呈均勻分布的噪聲,但由于這種方法把邊界處灰度變化較大位置的點也當作椒鹽噪聲處理,因此他對這樣的噪聲效果甚微,并且還經(jīng)常對圖像造成模糊。為了克服這些問題,采用非線性濾波,中值濾波進行處理是最常用的一種方法。當考慮一個小鄰域時,椒鹽噪聲能得到高效的抑制。然而中值濾波的最大缺點是他作用于整幅圖像,因此損失其中的大部分細節(jié)。為此找一種既能有效去除噪聲又能保持細節(jié)的方法是許多人感興趣的問題。
為了解決這個問題,大家已研究了不少基于中值濾波的改進方法如:權衡中值濾波,最大最小值的方法,中心權衡的中值濾波,強有力的最大最小值的方法,自適應的消減均值濾波,正則化的方法等。為了防止改變非噪聲點的值,這些方法都涉及噪聲點的識別問題。基于最大最小值的波峰波谷方法是一種非迭代的快速算法,但他對噪聲點的毀壞程度(即恢復后的圖像與原圖像相比灰度值不同點的百分數(shù))比較高,造成了細節(jié)的不小損失。去除脈沖噪聲的高效方法對噪聲的探索比較有效,但對噪聲的濾除卻使用了簡單的標準中值方法,使得最終的實驗結果不是很好。本文綜合兩者的優(yōu)點,提出了一種既能去除噪聲又能比較好的保持細節(jié)的有效方法。他分兩步達到去噪目的:第一步在文獻[7]的基礎上同時考慮了與中心點灰度最接近的幾個象素點的均值與一個客觀的閾值做比較,來更加有效地識別噪聲點;第二步采用了文獻[7]中的最大最小值的方法。
2 中值濾波
中值濾波是基于統(tǒng)計學的一種最常用的非線性濾波方法。我們考慮5×5模板,如圖1所示。
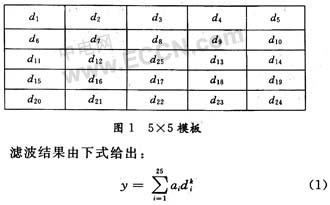
這里的dki是25個輸入統(tǒng)計量,常數(shù)ai可以根據(jù)具體問題進行選擇。中值濾波是當式(1)的系數(shù)狳了a13以外的ai均取零時的一種特殊情況。當噪聲點數(shù)量少手窗中抽樣的一半時,中值濾波是非常有效的。
3 基于最大最小值的波峰波谷濾波
基于最大最小值的波峰波谷濾波是一種基于排序來消除圖像噪聲的非線性非l迭代的濾波方法。他分兩步完成,具體算法如下:
值得注意的是按這種方法的第一步探索的點不一定是噪聲點,因為在分析的窗中如果沒有噪聲點,最大或最小值點仍被視為噪聲點,比如窄的邊緣,細線及部分平坦灰度區(qū)域,他們的灰度值也有可能等于窗內(nèi)的極值。因此這種濾波方法可能對邊緣造成平滑,把細線當作噪聲除掉,還有可能對平坦區(qū)域的細節(jié)造成模糊,如圖2所示。

圖2(a)為不含噪聲的原圖像;圖2(b)為噪聲密度5%的污染圖像;圖2(c)為基于最大最小值的波峰波谷濾波方法結果;圖2(d)為建議的方法得到的結果。
下面為了敘述問題的方便,先引入一個概念:均值MTP。我們把中心點x(i,j)與其方形鄰域的灰度差記NLD(這里考慮的是5×5的模板),然后對他們進行排序RLD,取其最小的13個元素的均值即為所述的均值MTP。

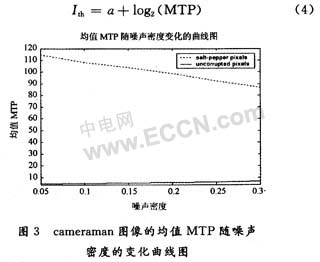
為了克服上面算法的不足,我們考慮了中心象素與其鄰域象素的相似性。這是因為圖像中未污染點周圍一般都存在一定數(shù)量灰度值與其相近的點,也就是說這些點與其鄰域像素的相關性比較大,而椒鹽噪聲點周圍很少存在這樣的點。如圖3給出的cameraman圖像的均值MTP隨噪聲密度變化的曲線圖。上面的虛線為椒鹽噪聲點的均值隨著噪聲密度的增加而變化的情況;下面的實線為不受噪聲污染的點隨噪聲密度的增加而變化的情況。從圖中明顯看到污染點的均值T1明顯大于未受污染點的均值T2,且T2隨著噪聲的增加變化很小,接近于常數(shù)。因此利用未受污染像素點與其鄰域像素相關性較大這一特性就能較好的把圖像中窄的邊緣,細線及部分細節(jié)與噪聲區(qū)分開來,在去除噪聲的同時有效地保護細節(jié)和邊緣。
如何進一步探索噪聲點,具體來說就是:將MTP與一個客觀的閾值Ith做比較。如果被考慮的中心象素所對應的均值MTP≥Ith,就說明該點與其鄰域像素的相關性比較小,他可能為噪聲點;否則該點就被視為非噪聲點。
為了使本方法具有普遍性,可以使用于多樣的圖像和噪聲分布,減少人為的選擇,實驗采用了多個標準圖像進行處理。根據(jù)多次試驗采集的數(shù)據(jù),在不同噪聲密度下(5%,10%,15%,20%,30%),參數(shù)a的選取以濾波效果峰值信噪比PSNR和噪聲對圖像的毀壞程度為標準而得到。多個實驗結果表明,其分布曲線相似。下面以cam-eraman圖像為例給出了峰值信噪比和噪聲對圖像的毀壞程度隨a變化的曲線(圖4),從圖4中可以看到在不同的噪聲密度下峰值信噪比當a的范圍在25~50之間時,隨a的不同取值變化不是很大。毀壞程度當a>5時,幾乎沒什么變化。綜合這兩方面的因素,在不同的情況下,a一般在25~50之間就能達到較好的效果。這說明此方法有比較強的實用性。
因此我們建議的算法如下:
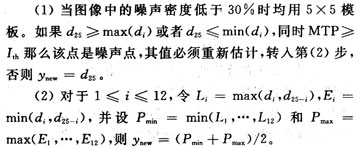
這種方法對于所含噪聲比較低(少于20%)的圖像非常有效,此時誤探點如果非常多,就會造成細節(jié)的很大損失與邊緣的光滑。而這時考慮了中心象素與其鄰域象素的相似性就能方便地完成噪聲探索問題,大大地降低毀壞程度,有效地保持圖像的邊緣和細節(jié)。

4 實驗結果分析與討論
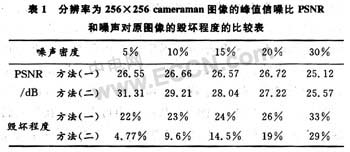
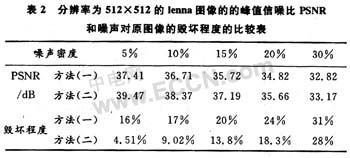
我們用了兩個例子將基于最大最小值的波峰波谷濾波方法(一)和本文建議的方法(二)進行了比較。表1是分辨率為256×256 cameraman圖像用這兩種方法處理過后的圖像的峰值信噪比PSNR和噪聲對原圖像的毀壞程度的比較;表2是分辨率為512×512的lenna圖像的處理結果比較。從表1、表2中,很容易看出當噪聲密度比較低時建議方法(二)的有效性,尤其是濾波后對圖像的毀壞程度遠低于原來的方法(一)。當噪聲密度比較大時,對參數(shù)a作相應的調(diào)整(一般應比噪聲密度低時小一些)后也能達到比較滿意的結果。
5 結 語
在這篇文章中,我們對基于最大最小值的波峰波谷濾波進行了改進,建議了一種非迭代去除椒鹽噪聲的有效方法。噪聲識別中用了文獻[7]中的極值方法,另外還考慮了中心象素與其鄰域象素的相似性,然后用強有力的最大最小值的方法來估計噪聲點的值。建議的方法和基于最大最小值的波峰波谷濾波方法從峰值信噪比和噪聲對圖像的毀壞程度上進行了比較,實驗結果表明無論在消除噪聲方面還是在保持圖像細節(jié)上都明顯優(yōu)于原來的方法,能快速地達到去噪目的。

電源濾波器相關文章:電源濾波器原理
數(shù)字濾波器相關文章:數(shù)字濾波器原理
評論