基于Lonworks總線的嵌入式智能節點的設計

OS_CPU_C.C要求編寫六個簡單的c函數:OSTaskSiklnit();OSTaskCreateHook();OSTaskDelHook();OSTaskSwHook();OSTaskStatHook();OSTimeTickHook()唯一必要的函數是OSTaskStklnit(),其它五個函數必須聲明但沒必要包含。對于OSTaskStklnit()而言,OSTaskCreate()和OSTaskCreateExt()通過調用OSTaskStkInit()來初始化任務的堆棧結構,OSTaskStkInit()返回堆棧指針所指的地址,OSTaskCreate()會獲得該地址并將它保存到任務控制塊(OS TCB)中。
本文引用地址:http://www.104case.com/article/87438.htmCPU_ A.ASM要求編寫四個簡單的匯編語言函數:OSStartHighRdy();OSCtxSw();
OSIntCtxSw();OSTickISR()。將所有與處理器相關的代碼放到OS_CPU_C.C文件中,而不必放在一些分散的匯編語言文件中。
(1)OSStartHighRdy():運行高優先級就緒任務函數OSStartHighRdy()必須調用OSTaskSwHook(),因為OSTaskSwHook()可以通過檢查OSRunning而確定是OSStartHighRdy()在調用它(OSRunning為FALSE)還是正常的任務切換在調用它(OSRunning為TRUE)。OSStartHighRdy()還必須在最高優先級任務恢復之前和調用OSTaskSwHook()之后設置OSRunning為TRUE。
(2)OSCtxSw()、OSIntCtxSw():上下文切換函數任務級的切換是通過發軟中斷命令來完成的,其中斷向量地址必須指向OSCtxSw()。中斷級的切換由OSIntExit()通過調用OSintCtxSw()來執行切換功能。
(3)OSTickISR():定時中斷函數OSTickISR()函數主要負責進人中斷時保存處理器寄存器內容,完成任務切換退出時恢復處理器寄存器內容并返回,相當于中斷服務程序的入口。
4 μc/os_Ⅱ與ShortStack的結合
因為μc/os_Ⅱ嵌入式操作系統代碼和ShortStack應用程序代碼的固有的特征,兩者可以有機的結合在一起。μcos_Ⅱ由系統服務,如郵箱、內存管理、消息隊列、信號量管理等,對于這些服務是在OS_CFG.h定義了的,當設計的系統要使用這些服務時只需要將定義的值改為1即可。將ShortStack應用程序中的常量定義全部放在OS_CFG.h中。這樣可以同時對操作系統各種服務函數和ShortStack 的API和APP函數實現了裁減。
將ShortStack應用程序當作μcos_Ⅱ操作系統的一個任務運行。先定義堆棧,以便保存本任務在任務切換時單片機的寄存器的當前值,當μcos_Ⅱ下次調度到該任務運行時就可以從堆棧恢復CPU的值,從而該任務繼續運行。程序如下:
OS_STK TaskStartStk[TASK_STK_SIZE]; //任務Task1的任務堆棧
OS_STK ShortStackStk[TASK_STK_SIZE]; //ShortStack的任務堆棧
… //其他任務堆棧
Void main(void)
{
OSInit();
OSTaskCreat(Task1,(void *)0,& TaskStartStk[TASK_STK_SIZE-1],0);
OSTaskCreat(ShortStack,(void *)0,& ShortStackStk[0],2);
… //創建其他任務
OSStart();
return 0;
}
void ShortStack(void)
{
lonInit();
for(; ; )
{
lonEventHandler();//周期性調用檢查是否有任何LonWorks事件要處理
}
}
由于μc/os_Ⅱ操作系統沒有任何的硬件驅動,所以用戶自己將ShortStack串口驅動、輸入輸出隊列操作部分擴展為該操作系統的一部分。此外,系統可以添加其他特定的任務,通過系統調度,實現節點的合理利用,增加節點的實用性。如圖4所示。
最后,將帶有TP/FT-10F控制模塊的MSP430F149芯片接入Gizmo4開發板,通過Nodebuilder開發工具編譯,進入調試界面,利用LonMaker連接為兩節點網絡,測試兩節點是否通訊。
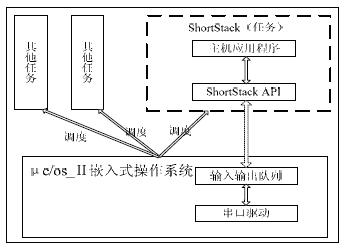
圖4 軟件結構圖
5 結束語
MSP430F149是16bit的RISC微處理器,該處理器特別適用于手持式設備以及高性價比、低功耗的網絡設備,它集成了中斷控制、功率控制、存儲控制、UART、PWM、ADC等豐富的資源。由于工業、家庭網絡化的需求,以及LonWorks總線便捷的入網方式,可以使該多用途智能節點分散自制,每個節點一方面分散地解決其特定的任務,另一方面通過點對點、點對多點的通訊,解決節點之間的信息傳輸,實現分散基礎上的融合。上位機要完成對LON 網絡的監控與管理功能,二者之間必須能進行動態數據交換。LON 總線技術還提供了DDE Server 軟件。DDE Server 能夠實現LON網絡和任何具有DDE 功能的Windows 應用程序間交換網絡變量和信息。系統提供給用戶一個十分友好的人機界面,用戶可通過上位機設置各節點實時運行情況以及歷史運行記錄、打印等。
本文作者創新點:運用ShortStack技術,設計了以MSP149為主處理器,Neuron芯片為微處理器的通用節點,與Lonworks總線實現通訊連接,并可擴展多種用途,具有很好的實用和經濟價值。
參考文獻
[1] David E.Simon著,陳向群等譯,嵌入式系統軟件教程[M].北京:機械工業出版社,2005
[2] ShortStack User’s Guide,Echelon, 2002
[3] Jean J.Labrosse著,邵貝貝譯,μC/OS_II源碼公開的實時嵌入式操作系統[M].北京:中國電力出版社,2001
[4] 胡大可 MSP430系列FLASH型超低功耗16位單片機[M].北京:北京航空航天大學出版社 ,2001
[5] 賈慧瀟,王振臣.基于LonWorks 的高性能溫濕度測控系統[J].微計算機信息,2006,8-1:30-34。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)







評論