基手單片機8089的超聲波電源控制技術的研究

隨著計算機軟硬件技術、電力電子技術及信號處理技術的飛速發展,超聲波獲得了非常廣泛的應用。近年來,由于微機的廣泛應用,構成計算機控制的智能控制系統或裝置越來越多。這里基于PWM技術,應用單片機組成智能控制系統,對目前的大功率、高頻率、高性能的智能化超聲波電源技術進行了研究。
本文引用地址:http://www.104case.com/article/87365.htm1 系統的硬件電路組成
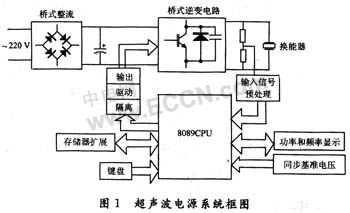
系統原理框圖如圖1所示,他包含功率變換主電路和控制電路兩大部分。主電路采用交-直-交結構,包括整流、直流濾波器、逆變器、變壓器及負載等組成部分。其中,交-直部分為橋式整流,經過電解電容器慮波得到平穩電流。逆變器選用IGBT作為開關元件,電路在傳統橋式結構的基礎上加入一個簡潔的輔助網絡,形成移相控制全橋逆變器,該電路可以在任意負載和輸入電壓范圍內實現零電壓開關(ZVS),減少損耗,提高了電源利用效率。
逆變器的控制電路在整個系統中至關重要,這里采用MCS-96系列8089單片機作為智能控制部分的核心,采用正弦脈寬調制方式(SPWM)對逆變器進行控制,用以實現功率匹配和頻率跟蹤的數字化技術。
1.1 單片機控制系統
本控制系統由MCS-96系列8089單片機、74LS138地址譯碼、EPROM2764和RAM6264等構成最小微機系統,完成超聲波頻率給定、載頻頻率設定,模擬輸出單極性正弦波恒幅脈寬調制信號(SPWM),還可實現功率、頻率顯示以及過壓、過流、過溫保護控制。
超聲波電源系統中負載換能器工作在諧振狀態,為了保證負載端電流和電壓同頻同相,要加上同步鎖相環。因此,本文逆變環節采用雙環結構的PWM控制方式,控制框圖如圖2所示。
同步電壓信號由相位及峰值檢測電路送至單片機鎖相處理,單片機通過D/A數模轉換口輸出與同步電壓同相位的標準正弦波,外部電壓環通過將直流母線電壓給定信號U*d與實際的直流母線電壓Ud進行比較后得到的誤差信號送入PI調節器,PI調節器的輸出則為要控制的輸出電流幅值指令信號Im,這里電壓環的PI調節器在單片機內部用軟件來實現。電流幅值指令信號Im與標準正弦波相乘后得到了幅值可調的正弦電流給定信號i*a,與實際的輸出電流反饋信號ia進行比較,電流誤差信號經比例調節器(為減小穩態誤差,這里采用大比例控制,由外部硬件電路實現)放大后送入比較器,再與三角載波信號比較形成SPWM信號,該SPWM信號經過驅動電路去驅動主電路開關器件,便可使實際的輸出電流跟蹤給定信號,從而達到與同步電壓保持同相位變化,提高了輸出的功率因數,同時由于輸出電流的幅值決定了輸出功率的大小,那么幅值可調也決定了輸出功率的可調,并且也達到了控制支流母線電壓的目的。

1.2 SPWM原理和波形
脈寬調制逆變器簡稱PWM,簡單地說,是通過控制逆變器內部開關器件的通、斷順序和時間分配規律,調控逆變器輸出電壓中基波電壓的大小和頻率,增大輸出電壓中最低階次諧波的階次,并減小其諧波的數值,來達到調控其輸出電壓,同時又改善輸出電壓波形的目的。
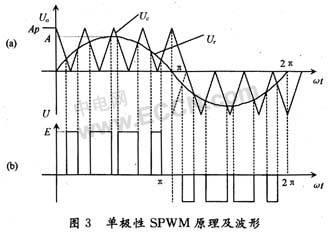
本文采用單極性正弦波恒幅脈寬調制信號(SPWM),調制原理見圖3。圖3中,Uc是載波信號,Ur調制信號,利用采樣控制理論中沖量等效原理,在他們相交點可得到一組等幅矩形脈沖,脈寬和正弦曲線下的面積成正比,脈寬基本上呈正弦分布。從圖中也可以看出在單極性調制時,Uc是與Ur始終保持同極性的關系,即正弦波處于正半周時,載頻信號也在正值范圍內變化,產生正的調制脈沖序列,與此相同,在負半周產生負的調制脈沖序列。根據在正弦波半周內載頻信號的頻率,可以確定產生調制脈沖的數目,這樣也就同時決定了控制各個功率管的通斷次數。SPWM產生的調制波是一系列等幅、等距而不寬的脈沖序列。
1.3 軟鎖相
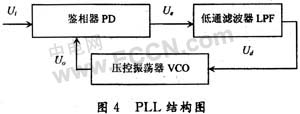
鎖相環是一個相位反饋控制系統。鎖相環由三部分組成,即鑒相器(PD)、環路濾波器(LPF)和壓控振蕩器(VCO),其基本構成如圖4所示。其主要工作原理:輸入電壓與輸出Ui與輸出Uo通過鑒相器PD進行相位比較,得到相位誤差信號Ue,Ue再經過低通濾波器LPF產生控制電壓Ud,Ud加到壓控振蕩器VCO上使之產生頻率偏移,從而跟蹤輸入信號的頻率,當輸入信號頻率與輸出信號頻率相同時,鎖相環鎖定,從而實現頻率跟蹤。
本文利用單片機8089實現軟鎖相。鎖相部分的軟件設計主要分兩個部分,一是輸入電壓U的相位檢測;二是電流指令正弦波的輸出。
相位的檢測利用8089單片機的外部中斷實現,其P0.7引腳的正跳變信號觸發中斷,連續兩次正跳變的時間間隔即為負載基波電壓的周期丁Ts。
正弦電流指令的產生由8089單片機與D/A轉換器共同完成,他是由N級階梯波近正弦。8089單片機有2個定時器和4個軟件定時器,且均可產生中斷,軟件定時器的中斷時間間隔可設定,利用他來產生正弦的數字信號。首先根據D/A轉換器的參數生成基準正弦Su的正弦表,綜合考慮8089單片機的運算速度以及控制程序的運行等,選取合適的正弦表點數(亦即階梯波的階梯數)N,則每個階梯所占的時間為Ts/N。在軟件定時器中斷服務程序中,首先設定下一次的軟定時中斷時間Ts/N,再利用查表法實現i*=α?Su,這里α為正弦的比例系數,由電壓環的誤差電壓決定其大小。
以上分析了相位的檢測和正弦電流指令的產生,接下來是實現正弦指令與輸入電壓的同步。在利用查表法產生正弦時,正弦表指針P對正弦表循環計數(0~N)。當發生外中斷,即負載基波電壓過零時,正弦電流指令也應該正向過零點,所以在外部中斷服務程序里,應該修改指針P,使P位于正弦表的正向過零點。然而由于存在軟硬件的延時,往往不能將P指向正弦表的正向過零點,而應指向p*(這里p*與正弦表的正向過零點有一個偏差△p),才能使D/A輸出的電流指令i*與輸入電壓U的相位差為0。p*的選取需要在實驗中確定,于是在外中斷服務程序里將P指向p*。
2 系統軟件設計
2.1 主程序
主程序包含初始化子程序、顯示子程序和采樣子程序以及中斷程序地址的設定,參數的設定等,開放軟中斷以及軟定時中斷等。初始化子程序中,對各寄存器設定初值,對單片機本身的I/O口、定時器設定工作方式。顯示子程序可對電壓與電流信號進行定時采樣,A/D轉換后,經I/O口輸出,進行動態顯示。本系統還可對超聲波電源頻率、功率進行設定、顯示。
2.2 中斷服務子程序
中斷服務子程序分為外部中斷服務程序和軟件定時器中斷服務程序
2.2.1 外部中斷服務程序
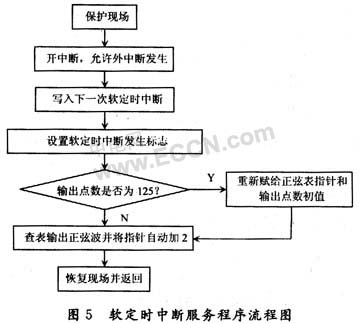
外部中斷服務程序中主要完成以下任務:在每次發生外部中斷時,把指針P重新指向p*,同時將正弦表點數即階梯數賦給初值(這里程序中一共在一個周期中設置了125個正弦表點數,每次外中斷發生時,依次輸出125個點即完成正弦電流指令的輸出),并設置外中斷發生標志和采樣標志。
2.2.2 軟件定時器中斷服務程序
軟件定時器根據母線電壓PI子程序計算的正弦比例來實現正弦波的輸出,或者也可以通過軟件設置為固定的比例輸出,即固定的功率輸出。由于采用周期控制,一個周期20 ms,正弦表點數取為125,所以大約160μs發生一次中斷。其程序流程圖如圖5所示。
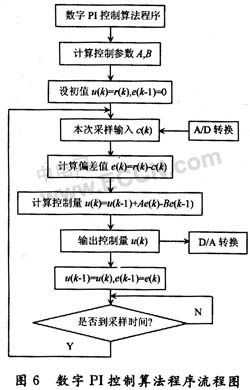
2.3 母線電壓PI調節子程序
母線電壓采樣信號送人CPU后,由軟件來實現電壓環PI調節的數字化,本文采用增量型PI算法,其表達式為:
![]()
令A=KP+KIT,B=KP,他們是與比例系數、積分系數、采樣周期相關的系數。則上式可簡化為u(k)=u(k-1)+Ae(k)-Be(k-1),那么數字PI控制算法的程序流程圖如圖6所示。
3 結 語
基于SPWM技術的大功率超聲波電源由于采用單片機智能控制系統,從而使電源頻率可實現人工設定,輸出電壓亦可通過調節可控整流角α而改變;鎖相環實現輸出電流與電壓保持同頻同相,從而能將電能以近似于1的功率因數,提高了電能利用率;同時采用高頻調制后可獲得高質量的輸出電流波形,抑制了高次諧波,使換能器損耗減小,從而可為大功率超聲波換能器在各個領域應用提供性能優良的超聲波電源。

逆變器相關文章:逆變器原理
pwm相關文章:pwm是什么
單片機相關文章:單片機教程
逆變器相關文章:逆變器工作原理
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理











評論