利用多核Blackfin處理器實(shí)現(xiàn)基于攝像頭的交通標(biāo)志識(shí)別
——
作者:ADI公司 Thorsten Lorenzen
時(shí)間:2008-06-06
來源:汽車電子技術(shù)專刊
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫查詢
提示:每次寫入操作都得到一個(gè)回寫緩沖器的支持。因此,如果在寫入操作之間存在足夠多的時(shí)鐘周期的話(比如,計(jì)算隨后的結(jié)果需要一些寫操作),處理器的內(nèi)核將不會(huì)等待寫入操作的結(jié)束,而會(huì)繼續(xù)處理下去。因此,看起來寫入外部存儲(chǔ)器的操作可以在一個(gè)處理器內(nèi)核周期內(nèi)完成。
當(dāng)然,這一過程也可以通過使用DMA控制器來獲得更高的效率。為了執(zhí)行“成簇”模塊,來自于Hough空間的數(shù)據(jù)被逐行讀出,送至L1存儲(chǔ)器。該任務(wù)同樣由DMA通道來執(zhí)行。由于只需訪問最快速的存儲(chǔ)器,因此該濾波器模塊可以被處理器全速執(zhí)行。由于不再需要Hough空間的內(nèi)容,因此必須將其歸零,以供下一次操作所用(Clear Hough Space)。該任務(wù)也同樣可由一個(gè)DMA通道來執(zhí)行,并不會(huì)給處理器帶來負(fù)擔(dān)。在下一步中,圓環(huán)探測(cè)器將獲取成簇操作的結(jié)果和Sobel模塊,并確定圓環(huán)的半徑和準(zhǔn)確位置。由于交通標(biāo)志可能的位置現(xiàn)在已經(jīng)清楚,因此就可以通過一個(gè)DMA通道將其從原始圖像中下載下來。為了做到這一點(diǎn),首先要將含有幾個(gè)交通標(biāo)志的一個(gè)區(qū)域傳送到L2存儲(chǔ)器中。來自于各個(gè)交通標(biāo)志的連續(xù)的細(xì)節(jié)信息將從這一區(qū)域載入L1存儲(chǔ)器中。為了分析出各個(gè)交通標(biāo)志,就需要用于比較的模板。模板數(shù)據(jù)庫的一部分被載入L2存儲(chǔ)器。與待識(shí)別的標(biāo)志一樣,用于比較的模板也會(huì)連續(xù)的從L2存儲(chǔ)器載入L1存儲(chǔ)器中。現(xiàn)在識(shí)別模塊可以將定位出的交通標(biāo)志與所有的模板進(jìn)行對(duì)比,并產(chǎn)生已被識(shí)別的標(biāo)志列表。一旦這一過程完成,處理器內(nèi)核1(Core A)將向處理器內(nèi)核2(Core B)發(fā)出一條消息,詳細(xì)說明發(fā)現(xiàn)了哪個(gè)交通標(biāo)志。處理器內(nèi)核1就將開始對(duì)第二幅圖像(frame1)進(jìn)行計(jì)算。
在處理器內(nèi)核2的接口完成配置后,該內(nèi)核將等待處理器內(nèi)核1發(fā)出的關(guān)于已經(jīng)識(shí)別出一個(gè)交通標(biāo)志的消息。在接收到該消息后,它將開始通過DMA通道傳送第一幀圖像。隨后還需要執(zhí)行下面的步驟。在接收到交通標(biāo)志信息后,一個(gè)DMA通道將利用Load Overlay指令把相關(guān)的符號(hào)拷貝到正在進(jìn)行分析的原始圖像上。在色彩空間變換模塊中,一幅圖像通過DMA通道逐列載入L1存儲(chǔ)器中。處理器內(nèi)核2現(xiàn)在可以開始執(zhí)行YUV格式到RGB格式的色彩空間變換。同時(shí),圖像數(shù)據(jù)從VGA格式縮減為QVGA格式,而且進(jìn)行90°旋轉(zhuǎn)。所生成的圖像數(shù)據(jù)隨后通過圖像接口(PPI1)傳送到TFT顯示器上。圖6示出了這一流程以及DMA通道所執(zhí)行的任務(wù)。
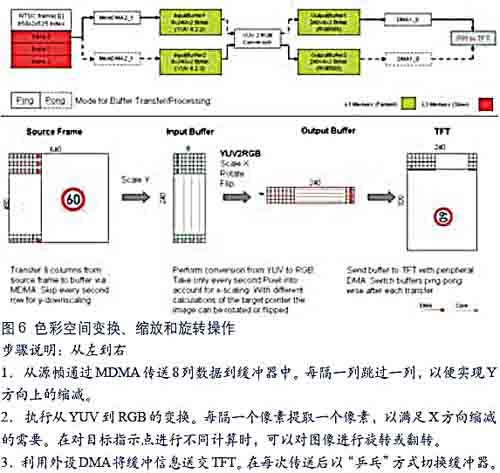
相關(guān)信息:ADSP-BF54x系列Blackfin處理器的最新版本包含了一個(gè)用于處理疊加圖像(Pixel Compositor)的硬件加速器和一個(gè)擴(kuò)展視頻接口(EPPI)。于是,色彩空間變換、縮放和圖像疊加可以在無需處理器參與計(jì)算的情況下完成。




評(píng)論