基于PIC16F877A自動太陽跟蹤器的設計

光伏發電能為人類提供可持續能源,并保護賴以生存的環境,但其發電效率低,發電成本相對較高仍然足制約其大規模應用的重要因素。在沒有出現高效的光伏電池材料之前,研制具有實用價值太陽聚光器及自動跟蹤系統以實現低成本,則是促進太陽能廣泛應用的主要途徑之一。一般雙軸系統可提高發電量35%左右,單軸系統可提高20%左右,聚光型跟蹤系統會更高。
國外在20世紀80年代就對太陽跟蹤系統進行了研究,如美國、德國在單雙軸自動跟蹤、F1本在聚光菲立爾透鏡跟蹤、西班牙在2倍聚光反射跟蹤等方面均開發出了相應的商品化自動太陽跟蹤器。我國于20世紀90年代左右也對其進行了大量的研究,2006年10月在西藏羊八井安裝了4套共計13.2 kW不同形式的單、雙軸并網發電太陽自動跟蹤系統。之前一直沒有穩定可靠的商品化的產品出現,究其原因主要有:
(1)系統可靠性不能滿足要求
由于大部分光伏電站都安裝在偏遠地區,環境非常惡劣,維護困難,跟蹤系統增加了旋轉機構與相應的機械機構,可靠性明顯下降,如果不能保證整個系統的在各種環境下都能可靠穩定運行,對整個光伏電站來說都可能將是災難性的打擊。
(2)跟蹤誤差大
尤其對反射聚光的跟蹤系統,如果跟蹤誤差大,不但不能提高發電效率,反而會使電池板受光小均,產乍熱斑等影響,大大縮短了電池板的使用壽命。
(3)成本過高
全部購買國外成熟的技術,將大大提高系統的硬件成本與維護成本。
本文基于PIC16F877微處理器為核心,針對光伏發電系統,開發出一種雙軸自動自動太陽跟蹤器,他具有運行穩定可靠、跟蹤誤差小、成本低等優點。
1 自動太陽跟蹤器的基本原理[1-3]
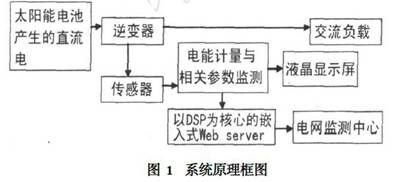
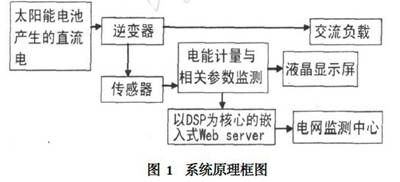
自動太陽跟蹤器,故名思意基本功能就是使光伏陣列隨著太陽而轉動,基本原理框圖如圖1所示。

該系統時刻檢測太陽與光伏陣列的位置并將其輸入到控制單元,控制單元對這2個信號進行比較并產生相應的輸出信號來驅動旋轉機構,使太陽光時刻垂直入射到光伏陣列的表面上。
雖然太陽在太空中的位置時刻都在變化,但其運行卻具有嚴格的規律性,在地平坐標系中,太陽的位置可由高度角a與方位角φ來確定,公式如下[2-3]:

式中: δ為太陽赤緯角;φ為當地的緯度角;ω為時角。
太陽赤緯角與時角可以由本地時間確定,而對確定的地點,本地的緯度角也是確定,因此只要輸入當地相關地理位置與時間信息就可以確定此時此刻的太陽位置。

2 系統的整體設計方案
PIC16F877A是一款具有RISC結構的高性能中檔單片機,僅有35條單字指令,8 k


評論