高精度低功耗光譜輻射計數(shù)據(jù)采集卡的設計

摘 要:本文介紹了高精度、低功耗光譜輻射計數(shù)據(jù)采集卡的的工作原理、軟硬件構成及設計方案。該數(shù)據(jù)采集卡不僅測量精度高、速度快、安全性好,而且有益于以此數(shù)據(jù)采集系統(tǒng)為核心的光譜輻射計向小型化、智能化方向發(fā)展。
關鍵詞:數(shù)據(jù)采集卡;光譜輻射計;浮標
引言
我國于2001年發(fā)射了自己的水色衛(wèi)星,為適應水色遙感發(fā)展的需要,我們研制了我國近海海洋光學浮標。錨鏈式水下多光譜輻射計是計劃裝備在其中的一臺主要觀測設備。數(shù)據(jù)采集系統(tǒng)是該設備的工作控制中心。
總體設計思想及工作原理
鑒于錨鏈式水下多光譜輻射計的特定工作環(huán)境和工作周期,在設計過程中,對數(shù)據(jù)采集卡的設計必須遵循高精度、低功耗等原則。首先,由于浮標在海中采用自主供電方式連續(xù)工作三個月以上,必須合理利用供電電池的能量以確保電池有足夠的電量供給儀器正常工作。為此,必須采取有效的措施提高電源的利用率。其次,海水深處的光信號都比較弱,對于微弱光信號的探測,一方面要采用高靈敏度自帶前置放大的光電探測器(其內部前置放大器采用載波自穩(wěn)零運算放大器,其低頻特性接近理想運算放大器),另一方面要提高儀器的整體精度。同時,浮標工作時所測數(shù)據(jù)必須與當時的位置(包括深度、方位角等)一一對應起來。另外,對于光學窗口還必須進行防污染保護。
數(shù)據(jù)采集卡被設計為一獨立自帶CPU的測量單元,通過其內部時鐘中斷來觸發(fā)CPU開始采樣控制、在數(shù)據(jù)采集卡上電工作、完成浮標控制中心要求的工作(如除污、采樣、通信等)。接收到浮標控制中心的停止命令后,CPU模塊主動向數(shù)據(jù)采集卡上的時鐘芯片寫入下一次工作時間,然后關掉所有的電源供電,使整個儀器進入低功耗狀態(tài)。
數(shù)據(jù)采集卡的硬件組成
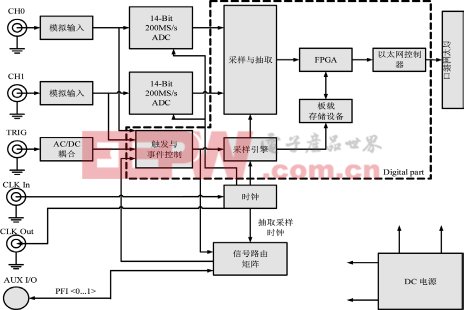
數(shù)據(jù)采集卡硬件電路部分如圖1所示。主要由CPU模塊、A/D轉換模塊以及電池管理三部分組成。
CPU模塊
CPU模塊作為整個光譜輻射計的控制中心,分別控制儀器的數(shù)據(jù)采集、傳輸,窗口的防污、除污以及儀器的供電過程。
CPU模塊中采用的單片機為美國Cygnal公司的C8051F020,它是完全集成的混合信號系統(tǒng)級MCU芯片,具有高達25MIPS的速度,以及強大的控制功能。由于其上集成了I2C、SPI、UART等串行通信方式,所以,當選用基于I2C通信的時鐘芯片和基于SPI通信的高精度ADC時,無需設計復雜的軟件模擬程序來仿真相應的SPI或I2C通信。
數(shù)據(jù)采集卡上電以后,CPU模塊先根據(jù)GPS(全球定位系統(tǒng))的時間對數(shù)據(jù)采集卡上的時鐘時間進行校準,然后等待浮標控制中心發(fā)送工作命令。在接收到工作命令后,CPU就會根據(jù)所接收到的工作命令,選擇數(shù)據(jù)采集卡當前要做的工作,包括控制ADC采樣、控制防污裝置清潔光學窗口、將ADC結果上傳給浮標控制中心等。在做完浮標控制中心指定的所有工作后,CPU模塊自動控制驅動馬達將防污染裝置的保護蓋轉回光學窗口上方,關斷系統(tǒng)除時鐘電源外的所有電源。 CPU模塊上的時鐘中斷時間可以是CPU模塊自定的八個定點中斷時間,也可以是浮標控制系統(tǒng)根據(jù)需要給定的加密中斷時間。在做完當天最后一次采樣后,CPU模塊會主動向板上時鐘寫入暗電流測量時間點,對儀器進行一次暗電流校準,該暗電流數(shù)據(jù)被保存在C8051F020的閃存里,留作第二天儀器測量的校準數(shù)據(jù),這樣可以保證儀器測量的準確性。
利用C8051F020內部自帶的8通道12位ADC可以完成對輻射計在海水中的深度及其傾角、方位角的測量。同時,可以通過它來檢測儀器電池組的電量,及時準確的提供信息給浮標的總體控制系統(tǒng)。
設計過程中,使用了C8051F020內部自帶的看門狗,無需外加其它復位源給CPU模塊。
A/D轉換模塊
A/D轉換模塊主要是將光電探測器探測到的、經預放大的光電信號轉換為數(shù)字信號。為了提高儀器的測量精度,實現(xiàn)預定的設計精度,在幅照度計中選用了一款高精度、寬動態(tài)范圍、Δ-∑型8通道24位ADC。基于SPI通訊的特點,ADC與單片機C8051F020之間進行通訊時硬件上只要連接簡單的三根線(SCLK,Din,Dout)就可以了,大大簡化了外圍電路的設計。
由于總共有24路光信號需要探測,本設計采用四片ADC通過C8051F020的控制實現(xiàn)光電信號的采樣和轉換。當采樣點到來時,輻射計的ADC在完成初始化工作后等待CPU發(fā)送采樣命令,CPU模塊在接收到浮標總體控制系統(tǒng)的采樣指令后就會發(fā)送相應的控制命令給ADC,ADC根據(jù)CPU的指令依次轉換光學信號,轉換結果先傳入C8051F020內部,在單片機內部完成平均、校正后等待上位機發(fā)送取樣命令,在接收到上位機發(fā)來的取樣命令后,CPU模塊通過UART接口將數(shù)據(jù)傳送給岸站上的浮標控制中心。ADC的模擬地和數(shù)字地在其外部某一點連接在一起。
電池組以及電源管理
由于儀器在海水中采用自主供電方式長時間連續(xù)工作。所以,為了提高電池的有效使用率,在設計中,通過兩個途徑來達到儀器低功耗的要求。首先,在選擇器件時要嚴格控制其功耗,盡可能的選擇同類產品中低功耗的器件;其次,對電源的使用進行合理的控制。由于浮標在海內連續(xù)工作三個月以上,每天工作8次,每次工作約5分鐘,因此,浮標工作時間遠小于不工作的時間,為了省電,本設計在輻射計中設計一高精度時鐘,讓它不間斷的工作(時鐘功耗低于1mW,采用一紐扣電池連續(xù)供電)。通過軟件控制時鐘在每天8個工作點分別產生中斷。
輻射計內部自帶可充電的三組電池,分別為3.6V、+14.4V和-14.4V。
軟件流程
圖2所示為數(shù)據(jù)采集卡的工作流程圖。相關軟件子程序采用匯編語言編寫完成。程序內開啟了F020內部的看門狗以確保儀器的穩(wěn)定性和可靠性。
結語
該數(shù)據(jù)采集卡被用于浮標水下多波段光譜輻射計中,主要用來測量水下真光層下行光譜幅照度以及對上行光譜幅亮度的剖面測量,通過實測水體光輻射數(shù)據(jù),來推導離水幅亮度、等水體光學參數(shù),估算海洋光合作用及其初級生產量,滿足水色衛(wèi)星遙感現(xiàn)場光輻射測量技術的需要。■
參考文獻
1 李剛等編著. 與8051兼容的高性能、高速單片機-C8051F系列。
2 最新A-D/D-A轉換器IC特性轉換手冊. 福建: 福建科學技術出版社,2001
3 曾慶勇編著. 微弱信號檢測(第二版). 浙江大學出版社,2002.1


評論