一種延遲電路在變頻控制中的應用

摘 要:本文主要介紹一個由RC和或門電路組成的延遲電路在一變頻控制中的應用,解決了原有芯片死區時間不確定的問題。
關鍵詞:延遲電路;IPM;死區時間
變頻控制死區時間簡介
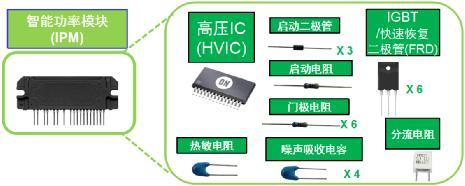
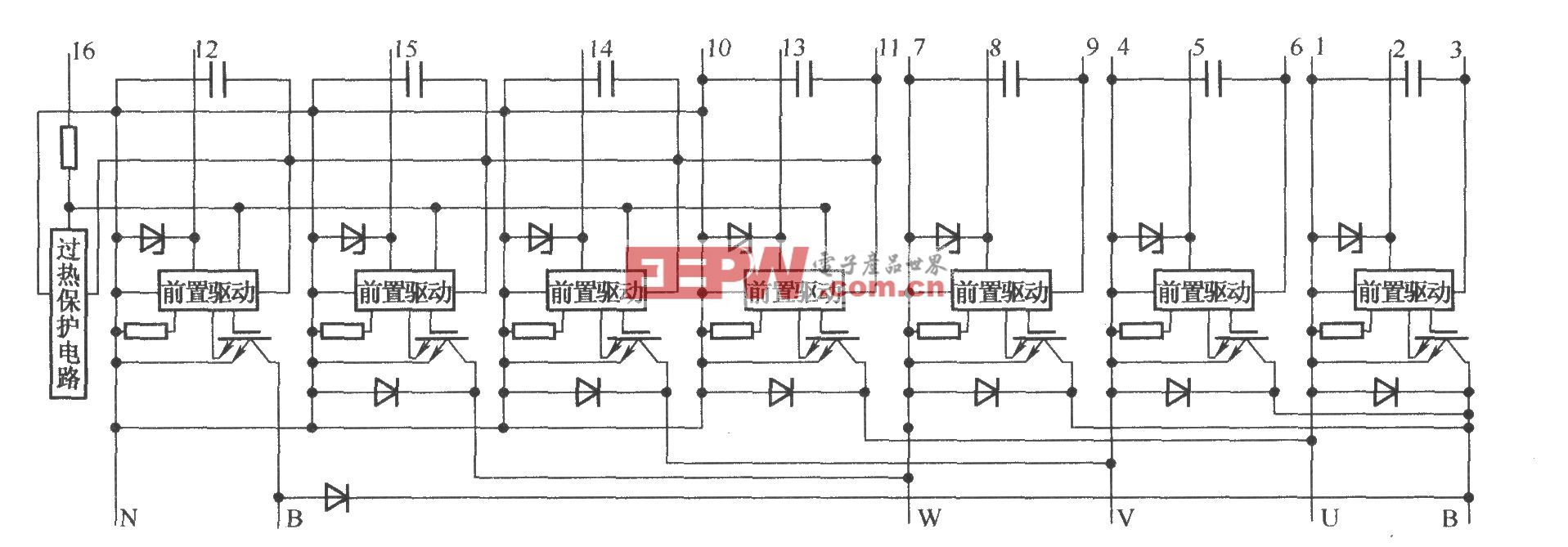
熟悉IPM(Inteligent Power Module)工作原理的工程師都知道,控制IPM工作的六路PWM信號,在導通時序上,控制同一通道的上下兩路信號不能出現同時導通的情況,如圖1所示。也就是說同一橋臂的兩個IGBT不能同時導通,如果同時導通,輕則引起IPM的工作保護,造成停機,重則將IPM模塊擊穿,造成模塊損壞。所以,在PWM信號的算法實現上,同一通道的上下兩臂的控制信號在導通時間上要有一個時間間隔,即“死區時間”。不同的模塊對死區時間的要求是不一樣的,如三菱采用分離電源供電的IPM 模塊,其死區時間通常要求在3.5ms以上,而采用單電源供電的模塊,其死區時間則可以做到2ms。通常,死區時間的數值可以在EEPROM中設置,表1即為本文所用模塊死區時間的設置表。
問題的出現及解決方案設想
在實際工作中會碰到這么一種情況,由于硬件掩膜的問題,造成了芯片上電后0、1狀態的不確定,除非EEPROM中設置為0,否則死區時間都是不確定的,從而使得模塊的可靠性大大降低。由于批次掩膜的數量多達數萬片,如果解決不了這個問題,則會造成很大的損失。為了有效地降低成本,必須想辦法把這批有缺陷的芯片利用起來。綜合各方面的考慮,要解決這一問題,本文提出了三種解決方案:
1. 增加一個芯片作為變頻驅動,原芯片作為主芯片。
2. 不增加單片機,選擇一款高速IPM,然后在EEPROM中設置一種理論上合理的死區時間,如2.4ms&19.2ms,由于芯片上電后0、1狀態的不確定,所以還需要通過實驗來進一步驗證:
a. 如果死區時間為2.4ms時IPM沒問題;
b. 如果死區時間為19.2ms時壓機電壓不存在問題。
則說明理論上該方案可行。
3. EEPROM中死區時間設置為0,然后增加一硬件延遲電路,對PWM控制信號的下降沿進行延遲拖后(信號低電平有效),上升沿不變,從而實現對死區時間的調節。
分析三種方案,第一種方案明顯地會增加產品的成本,第二種方案理論上可行,不過實驗上比較復雜,壓頻曲線難以確定,且會使產品的可靠性降低。第三種方案,由于要求只對信號下降沿進行延遲拖后,考慮到RC加一或門電路可以實現這一功能,如果增加這種延遲電路,成本增加不多,實驗上比較簡單,且還能使該芯片通用化,可行性好。下面就介紹該電路的實現方案。
實驗方案的實現及實驗結果
圖2為其中一路控制信號的原理圖。MCU輸出信號(X)經由設計的延遲電路延遲后(X)輸入到IPM模塊。由于EEPROM中的死區時間設置為0,所以,如果不加外圍電路,則PWM信號的死區時間為0.5ms,遠不能滿足模塊的工作條件,要保證IPM 正常工作,必須使信號延遲大于模塊能夠工作的最小死區時間。為了保證模塊能夠安全可靠地工作,這里選擇的外圍延遲時間為10ms,故電阻參數為1KW,精度為1%,電容為103pF,誤差為10%。經實際測試,電路實際效果如圖3(a)、圖3(b)所示。
圖3(a)為信號有延遲和無延遲的信號比較,其中3通道為有延遲的信號波形,2為無延遲的信號波形。從示波器上能夠明顯地看出3通道的信號下降沿有明顯的拖后,經測量,這個拖后時間為10ms左右。圖3(b)為同一橋臂的兩路信號經延遲后的波形,從波形可以看出,在2通道導通之前,3通道已經關斷,而3通道則是在2通道關斷以后才導通,保證了兩路信號之間穩定的死區時間。當然,波形上顯示這個死區時間并不是嚴格的10ms,但這個誤差是在允許范圍之內的,(下面會對此進行分析)。采用該電路后,壓縮機運行平穩,且滿足產品所要求的性能。
實驗誤差分析
考慮到延遲電路中電阻、電容的誤差,最大延遲誤差可以很容易地計算出:
上偏差:
ms
下偏差:
ms
由計算出來的結果可以看出,對于10ms的死區時間來說,該誤差是完全可以接受的。
結語
綜上所述,利用外圍所加的一個簡單的延遲電路,成功克服了芯片上的硬件缺陷,取得了顯著的經濟效益。■
參考文獻
1 [美]S.M.欣內爾斯著. 現代控制系統理論及應用. 第2版. 李育才譯. 北京: 機械工業出版社,1979
2 清華大學電子學教研組編. 模擬電子技術基礎簡明教程. 第1版. 高等教育出版社,1995
3 張燕賓著. SPWM變頻調速應用技術. 第2版. 機械工業出版社,2002





評論